Нечеткий анализ - в автомобиле
| Загрузить архив: | |
| Файл: nechet.zip (82kb [zip], Скачиваний: 29) скачать |
Московская Государственная Академия Приборостроения и Информатики
ДОКЛАД
по теория систем и системного анализа
«Нечеткий анализ – в автомобиле»
Выполнил: Пяров Тимур Р
ЭФ2, 2 курс, 35.14
2002
Москва
Нечетко едешь - дальше будешь
 Владельцы
отечественных автомобилей, в которых всей электроники - диодный мост генератора
да реле-регулятор, - зачастую и не подозревают, сколько вычислительных
устройств содержит обычная иномарка среднего класса, внешне ничем не приметная.
Оставим в стороне парковочные радары и климат-контроль - это в некоторой
степени роскошь, нас же интересуют вещи посерьезнее.
Владельцы
отечественных автомобилей, в которых всей электроники - диодный мост генератора
да реле-регулятор, - зачастую и не подозревают, сколько вычислительных
устройств содержит обычная иномарка среднего класса, внешне ничем не приметная.
Оставим в стороне парковочные радары и климат-контроль - это в некоторой
степени роскошь, нас же интересуют вещи посерьезнее.
Не надо объяснять, что полную математическую модель движения автомобиля (если рассматривать его не как материальную точку, а как набор движущихся относительно дороги и друг относительно друга деталей) создать невероятно трудно, да и с предсказуемостью дорожных условий дела обстоят хуже некуда (еще хуже - разве что с предсказанием действий водителя). Разумеется, бум микропроцессорной техники не обошел автомобилестроение стороной, но классическим вычислительным системам, вполне справляющимся с задачами управления объектами вплоть до атомных реакторов, эта комбинация асфальта, железа и человека оказалась не совсем по зубам. Причина - в вышеупомянутой невозможности описать поведение этой комбинации в терминах классической логики: автомобилестроение базируется в основном на экспертном опыте, формализовать который не удастся, скорее всего, еще долго. Но свято место пусто не бывает.
Первыми на нечеткую логику обратили внимание японские автомобилестроители. В 1991 году компания Nissan впервые применила компоненты нечеткой логики в системе управления пятискоростной автоматической коробкой переключения передач (АКПП), годом позже аналогичная система появилась на автомобилях Honda. Тогда же Mitsubishi Motors представила модель Lancer (каталоги относят ее к 1993 году, но зарубежные компании в таких случаях традиционно забегают вперед) с системой АБС на основе процессора с нечеткой логикой. Еще годом позже спохватились и американцы: концерн General Motors применил подобную систему для управления АКПП, но угнаться за японцами было не просто - к этому времени на том же Nissan была внедрена нечеткая логика в системах управления впрыском топлива для бензиновых двигателей. Ко второй половине прошлого десятилетия системами с использованием нечеткой логики штатно оснащались машины уже упомянутых Nissan, Mitsubishi и Honda, а BMW, Hyundai, Mazda, Mercedes и Peugeot планировали внедрить такие системы (вели подобные разработки и компании, сами автомобилей не производящие, например Bosh и Nippon Denso). Здесь нужно пояснить, что открытой информации о применении в тех или иных моделях систем с нечеткой логикой на сегодня попросту нет. И дело не только в защите производителями своих секретов. Отношение к самому понятию «нечеткие системы» в разных странах разное. Для японцев, «взрастивших» это направление, понятие «fuzzy» означает передовую технологию и использовании элементов искусственного интеллекта, соответственно само слово фигурирует в технических описаниях и рекламе устройств в качестве их несомненного достоинства. Для европейцев же фраза типа «тормозная система с использованием нечеткой логики» звучит практически эквивалентно «нечеткой тормозной системе», что потребитель может воспринять не совсем адекватно. Большинство европейских производителей просто не афиширует применение нечеткой логики, оправдываясь тем, что вся «нечеткость» зашита в микропрограмму управляющего контроллера, и не пристало потребителю интересоваться излишними тонкостями.
Типичный пример системы, хорошо поддающейся реализации с помощью нечеткой
логики, - АБС - антиблокировочная тормозная система.
Хотя первые подобные устройства были разработаны и внедрены еще в начале 1970-х
годов (ну-ка вспомните, какие модели отечественных автомобилей производились в
те годы нашим автопромом), высокая стоимость
компонентов этих систем (в основном модуля управления) не позволила внедрить их
массово. Через десятилетие АБС уже не считалась роскошью, но построение системы
управления реального времени с периодом цикла управления в единицы миллисекунд
при необходимости серьезной математической обработки или работы с огромными
таблицами все равно было делом непростым и недешевым. Реализаций АБС существует
множество, но в общем случае управление осуществляется по двум входным
параметрам: проскальзыванию колеса (отношение скорости автомобиля к мгновенной
линейной скорости точки на внешнем радиусе колеса относительно его центра) и
радиальному ускорению колеса. Оба параметра представляются в виде логических
переменных с набором из 5-8 термов каждая (например «отсутствует», «слабое»,
«среднее», «сильное», 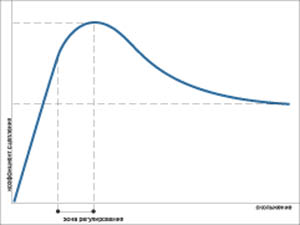
Возьмем что-нибудь посложнее. Еще один кандидат на «нечеткое управление» -
двигатель внутреннего сгорания (ДВС). Сложность систем управления ДВС в
последние годы значительно возросла - как в связи с ужесточением экологических
норм и требований к снижению расхода топлива, так и вследствие форсирования
двигателей: они стали более «нежными», требуя такого же нежного с ними
обращения (со стороны системы управления, разумеется). Несмотря на то что
основных параметров регулирования всего два - подача топлива и момент
зажигания, - системы управления типа PID-регуляторов в данном случае не
годятся, так как алгоритм управления в значительной степени зависит от скорости
вращения двигателя и нагрузки. Полная математическая модель ДВС слишком сложна,
и до сих пор не создана. Из-за этого большинство систем управления ДВС
используют табличную модель, полученную экспериментальным путем на испытаниях и
с учетом опыта экспертов. Серьезный недостаток такой модели - сложность
создания многомерных таблиц и большой объем памяти, требуемый для их записи,
если выходной параметр формируется в зависимости от трех и более входных.
Сегодняшние табличные системы используют в основном регулирование по двум
параметрам и, соответственно, трехмерные таблицы, описывающие поверхности.
Памяти под таблицу нужно от 64 Кбайт до 1 Мбайт (иногда и больше). Попытки
снизить разрядность входных и выходных переменных (обычно она составляет 6 или
8 бит) и применить интерполяцию не привели к успеху: вычислительной мощности
контроллеров оказалось мало для обеспечения требуемого периода регулирования
(единицы миллисекунд). Нечеткая логика позволяет заменить таблицы правилами
(несколько сотен) и реализовать 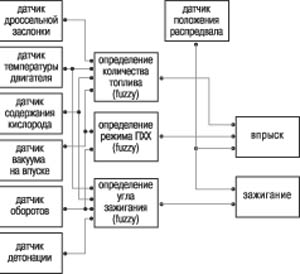
Один из вариантов системы управления ДВС с использованием нечеткой логики (Nissan) представлен на рис. 2. Основная идея в том, что первым делом определяется состояние двигателя, описываемое лингвистической переменной (назовем ее «состояние»). Для нее можно задать несколько термов, например, как в таблице.
Значение каждого из термов определяют сигналы с датчиков. Теперь, к примеру, ситуация «Двигатель запущен недавно, большая нагрузка, среднее ускорение» можно описать следующей комбинацией термов: {0,9; 0; 0; 1; 0; 0,5}. Принимая значения термов в качестве весовых коэффициентов, отдельные модули рассчитывают сигнал управления для подсистем впрыска, зажигания и принудительного холостого хода.
Еще одна система - автоматические трансмиссии, ничего не знающие в отличие от водителя об условиях движения, но вынужденные выбирать между экономичностью и динамикой - тоже «клиент» нечеткой логики. Их задача, как и в первых двух случаях, не описывается математически, зато вполне формулируется словами. Вот что необходимо:
§
§
§
В задаче с АКПП интересно то, что одним из «входных сигналов» для системы управления является… человек. Вернее, его действия в процессе движения, которые позволяют с некоторым приближением понять характер дороги или желания водителя. Частота нажатий на педаль акселератора позволяет судить, к примеру, об извилистости дороги, а амплитуда нажатий - о стиле вождения (можно, конечно, попытаться получить эти данные явно, с помощью кнопки «sport», но это не совсем спортивно). Рассматриваются и более сложные ситуации, как, например, повторное нажатие педали акселератора в интервале 1-1,5 секунды после первого, что расценивается как недостаточное ускорение и вызывает принудительное включение низшей передачи. Система управления в данном случае выполняет функции эксперта, подстраиваясь под явные или неявные желания водителя и понемногу двигаясь в сторону искусственного интеллекта.
|
Терм |
Действия |
Цель |
|
Запуск |
Зажигание раннее, смесь богатая |
Достижение минимальной скорости вращения |
|
Холостой |
Зажигание нормальное, состав смеси зависит температуры |
Поддержание минимальной скорости вращения и допустимого уровня CO |
|
Низкая |
Зажигание максимально позднее, но без детонации, состав смеси зависит от температуры |
Максимальная экономия топлива |
|
Высокая |
Зажигание раннее, смесь максимально богатая, но без превышения нормы CO |
Максимальная мощность |
|
Торможение |
Отключение подачи топлива |
- |
|
Разгон |
Обогащение смеси в зависимости от нагрузки |
Максимальное ускорение |
Имея описанные выше «умные» системы управления разгоном и торможением автомобиля, появляется законное желание объединить их в единый «интеллект» и возложить на него ответственность за поведение автомобиля если не постоянно, то хотя бы на критических участках, например, в виражах на скользкой дороге. Здравая мысль, но не вам первому она пришла в голову. Здесь лидируют немецкие автомобилестроители, и первые плоды их работы - это противозаносные системы, одновременно управляющие АКПП, блокировками дифференциалов трансмиссии и тормозами. Если в случае с той же АБС никто не мешает водителю делать так, как он хочет, лишь «корректируя» усилие торможения, то в данном случае педаль тормоза скорее становится датчиком для «интеллекта», чем реальным органом управления: вычислитель имеет возможность пользоваться тормозами, даже если водитель не нажимал на педаль, и, наоборот, игнорировать его действия. Водителю же остается только крутить руль, на который автоматика пока не посягает, но уже присматривается через глазки видеокамер. Впрочем, надеюсь, на наш век неавтоматизированных рулей хватит, и отечественный автопром нам в этом поможет.