Разработка контроллера встроенных каналов станции STM-1
| Примечание | от автора: Комплект из 13 чертежей формата А1 _не_прилагается_. UM01.RAR, UM02.RAR- распечатанные в файл из PCPRINT'а PCAD'овские (4.5) принципиалки с установками HP-шного принтера для печати из Корела. FUN-CDR.RAR- Кореловский файл с функциональной схемо |
| Загрузить архив: | |
| Файл: ref-1676.zip (1061kb [zip], Скачиваний: 70) скачать |
|
1. |
Введение |
||
|
2. |
Управление сетью: функционирование, администрирование, обслуживание |
||
|
2.1. Четырехуровневая модель управления сетью |
|||
|
2.2. Сеть управления телекоммуникациями TMN |
|||
|
2.2.2.1. Функциональные блоки и их компоненты |
|||
|
2.2.2.2. Информационный аспект архитектуры |
|||
|
2.2.2.3. Общий аспект архитектуры TMN |
|||
|
2.3. Общая схема управления сетью SDH |
|||
|
2.3.1 Подсеть SMS сети управления SMN |
|||
|
2.3.2. Функции Управления |
|||
|
2.3.2.1. Общие функции управления |
|||
|
2.3.2.2. Управление сообщениями об аварийных ситуациях |
|||
|
2.3.2.3. Управление рабочими характеристиками |
|||
|
2.3.2.4. Управление конфигурацией |
|||
|
2.3.3. Протоколы и внутрисистемные взаимодействия |
|||
|
2.3.3.1. Обзор используемых протоколов |
|||
|
2.3.3.2. Внутрисистемные взаимодействия |
|||
|
2.4.Практические методы управления сетью SDH |
|||
|
2.4.1. Сеть управления на основе каналов DCC |
|||
|
3. |
Разработка функциональной схемы контроллера встроенных каналов станции STM-1 |
||
|
3.1 Разработка архитектуры контроллера |
|||
|
3.2 Сигналы и линии |
|||
|
3.3. Разработка функциональной схемы СБИС ПЛ |
|||
|
4. |
Разработка принципиальной схемы контроллера |
||
|
5. |
Обзор используемых протоколов |
||
|
5.1. HDLC |
|||
|
5.1.1.Необязательные возможности HDLC |
|||
|
5.1.2.Формат кадра HDLC |
|||
|
5.1.3.Кодонезависимость и синхронизация HDLC |
|||
|
5.1.4.Управляющее поле HDLC |
|||
|
5.1.5.Команды и ответы |
|||
|
5.1.6. Процесс передачи в протоколе HDLC |
|||
|
5.1.7.Подмножества HDLC |
|||
|
5.2. LAPD |
|||
|
5.3. Разработка алгоритма передачи служебной информации |
|||
|
6. |
Охрана труда и безопасность жизнедеятельности |
||
|
6.1.Анализ опасных и вредных факторов производства при работе с ВДТ и ПЭВМ |
|||
|
6.2. Оптимизация информации, представляемой дисплеем |
|||
|
6.3.Охрана труда при работе с дисплеем |
|||
|
6.4. Основные мероприятия по защите персонала от воздействия вредных и опасных факторов |
|||
|
6.5.Влияние психофизиологических факторов |
|||
|
6.6. Организация рабочего времени |
|||
|
6.7. Требования санитарно-гигиенических норм |
|||
|
6.8. Выводы |
|||
|
7. |
Экономическое обоснование проектирования и изготовления платы КВК. |
||
|
7.1. Качественная оценка платы КВК. |
|||
|
7.2. Расчет себестоимости платы КВК |
|||
|
7.2.1. Определение единовременных затрат |
|||
|
7.2.2. Расчет заработной платы |
|||
|
7.2.2.1. Расчет основной заработной платы |
|||
|
7.2.2.2. Расчет дополнительной заработной платы |
|||
|
7.2.3. Расчет материальных затрат |
|||
|
7. 2. 3. 1. Расчет стоимости комплектующих изделий |
|||
|
7.2.3.2. Расчет стоимости вспомогательных материалов |
|||
|
7.2.3.3. Расчет отчислений на социальные нужды |
|||
|
7.2.3.4. Расчет цеховых расходов |
|||
|
7.2.3.5. Расчет общезаводских расходов |
|||
|
7.2.3.6. Расчет заводской себестоимости |
|||
|
7.2.3.7. Расчет полной себестоимости |
|||
|
7.3. Определение срока окупаемости разработки платы КВК |
|||
|
8. |
Заключение |
||
|
Приложение 1 |
1. ВВЕДЕНИЕ
Средства общения между людьми (средства связи) непрерывно совершенствуются в соответствии с изменениями условий жизни, развитием культуры и техники. Сегодня средства связи стали неотъемлемой частью производственного процесса и нашего быта. Современные системы связи должны не только гарантировать быструю обработку и высокую надежность передачи информации, но и обеспечивать выполнение этих условий наиболее экономическим способом. Высокая стоимость линий связи обусловливает разработку систем и методов, позволяющих одновременно передавать по одной линии связи большое число независимых сообщений— многоканальных систем передачи.
Первый вклад в технику многоканальной связи был сделан Г. И. Морозовым в 1869 году, предложившим способ одновременного телеграфирования по общей цепи с помощью токов различных частот. В 1880 году Г. Г. Игнатьев создал схему для одновременного телеграфирования и телефонирования, основанную на разделении телеграфных и телефонных сигналов с помощью простейших электрических фильтров, то есть был открыт принцип частотного разделения каналов (ЧРК), при котором сигналы от разных источников с помощью сигналов-переносчиков размещаются в непрерывных частотных полосах, по линии связи все разнесенные абонентские сигналы передаются одновременно. В конце 20-х годов был реализован полосовой фильтр, позволяющий выделять одну боковую полосу частот. К 1930 году появилась отечественная трехканальная аппаратура. В 1940 году была сдана в опытную эксплуатацию первая в СССР 12-канальная система передачи. После 1945 года техника многоканальной связи стала развиваться особенно интенсивно. Была разработана аппаратура К-12, затем 24-х и 60-ти канальные системы К-24-2 и К-60. Для передачи по коаксиальным кабелям разработаны системы К-120, К-300, К-1920, К-3600, К-2700, К-5400 и К-10800.
Системы передачи с ЧРК нашли широкое распространение. Они относительно просты в эксплуатации, имеют достаточно высокую надежность работы, хорошее качество передачи сигналов и обеспечивают необходимую дальность связи. Одним из основных недостатков этих систем является относительно низкая защищенность сигнала от помех, причем с увеличением протяженности магистрали защищенность уменьшается, т.е. с увеличением длины связи помехи накапливаются.
Кроме систем с ЧРК существуют системы передачи с временным разделением каналов (ВРК), когда осуществляется поочередная передача сигналов по линии связи от различных источников сообщений, полоса линейного тракта во время передачи сигналов каждого источника используется полностью
Интенсивное развитие цифровых систем передачи (ЦСП), которое наблюдается в настоящее время в большинстве развитых странах мира, объясняется следующими существенными преимуществами цифровых методов передачи по сравнению с аналоговыми :
1) высокая помехоустойчивость. Представление информации в цифровой форме, то есть в виде последовательности символов с малым числом разрешенных значений и детерминированной частотой следования, позволяет осуществлять регенерацию этих символов при передаче их по линии связи, что резко снижает влияние помех и искажений на качество передачи информации. В результате обеспечивается возможность использования ЦСП на линиях связи, на которых аналоговые применяться не могут. Так, цифровые методы передачи весьма эффективны при передаче по волоконно-оптическим линиям, отличающимся высоким уровнем дисперсионных искажений и нелинейностью электроннооптических и оптоэлектронных преобразователей;
2) слабая зависимость качества передачи от длины линии связи. В пределах каждого регенерационного участка искажения передаваемых сигналов оказываются ничтожными. Длина регенерационного участка и оборудование регенератора при передаче сигналов на большие расстояния остаются практически такими же, как и в случае передачи на малые расстояния. Так, при увеличении длины линии в 100 раз для сохранения качества передачи информации неизменным достаточно уменьшить длину участка регенерации лишь на 2-3%;
3) стабильность параметров каналов ЦСП. Стабильность параметров каналов (остаточного затухания, частотной характеристики, нелинейных искажений) определяются в основном устройствами обработки сигналов в аналоговой форме. Поскольку такие устройства составляют незначительную часть аппаратурного комплекса цифровых систем передачи, стабильность параметров каналов в таких системах значительно выше, чем в аналоговых системах. Этому способствует также отсутствие в цифровых системах с ВРК влияния загрузки систем передачи в целом на параметры отдельного канала. Кроме того, при ВРК обеспечивается идентичность параметров всех каналов, что также способствует стабильности характеристик каналов сети связи, тогда как в системах с ЧРК параметры последних зависят от их размещения в линейном спектре системы передачи;
4) эффективность использования пропускной способности каналов для передачи дискретных сигналов. Эффективное использование каналов цифровых систем для передачи дискретных сигналов обеспечивается при вводе этих сигналов непосредственно в групповой тракт ЦСП. При этом скорость передачи дискретных сигналов может приближаться к скорости передачи группового сигнала. Так, дискретные сигналы, вводимые в групповой тракт на временные позиции, соответствующие одному каналу ТЧ, могут передаваться со скоростью, близкой к 64кбит/сек. Скорость передачи дискретных сигналов при вторичном уплотнении канала ТЧ обычно не превышает 9,6Кбит/сек. Кроме того, ввод дискретных сигналов непосредственно в групповой тракт цифровых систем позволяет значительно снизить требования к частотной и фазовой характеристикам канала ТЧ, которые являются весьма жесткими при передаче этих сигналов методом вторичного уплотнения канала аналоговых систем передачи;
5) более простая математическая обработка передаваемых сигналов. Цифровая форма представления информации позволяет производить математическую обработку сигналов, направленную как на устранение избыточности в исходных сигналах, так и на перекодирование передаваемых сигналов;
6) возможность построения цифровой сети связи. Цифровые системы передачи в сочетании с оборудованием коммутации цифровых сигналов являются основой цифровой сети связи, в которой передача, транзит и коммутация сигналов осуществляются в цифровой форме. Отношение сигнал-шум, обеспечиваемое в оборудовании транзита и коммутации, является достаточно высоким. Следовательно, параметры каналов практически не зависят от структуры сети, что обеспечивает возможность построения гибкой разветвленной сети связи, обладающей высокой надежностью;
7) высокие технико-экономические показатели. Большой удельный вес цифрового оборудования в аппаратурном комплексе цифровых систем передачи определяет особенности изготовления, настройки и эксплуатации таких систем. Передача и коммутация сигналов в цифровой форме позволяют реализовывать весь аппаратурный комплекс цифровой сети на электронной основе с широким применением цифровых интегральных схем. Это позволяет резко уменьшать трудоемкость изготовления оборудования, добиваться высокой степени унификации узлов оборудования, значительно снижать его стоимость, потребляемую энергию и габаритные размеры. Высокая стабильность параметров каналов ЦСП устраняет необходимость регулировки узлов аппаратуры, в частности узлов линейного тракта в условиях эксплуатации, что существенно повышает технико-экономические показатели цифровых систем. Высокая степень унификации узлов также упрощает эксплуатацию систем и повышает надежность оборудования.
Из вышеизложенного видно, что цифровые системы передачи с ВРК обладают более высокими технико-экономическими показателями по сравнению с другими системами, и на сегодняшний день нашли очень широкое применение, особенно для организации связи на ГТС и местных сетях сельской и пригородной связи.
Спрос на телекоммуникационные услуги операторов связи разного уровня (местных, региональных, национальных) постоянно растет. Качество предоставляемых услуг определяется технической оснащенностью оператора связи и тем, какие каналы используются для передачи информации. Тенденция последних лет - переход на цифровые системы связи. И если в развитых странах этот процесс можно считать завершенным, то в России все только начинается. Теперь уместно кратко осветить особенности цифровых технологий передачи информации,организацию цифровых каналов, и существующие стандартами в этой области.
· Стандартный телефонный канал ТЧ.
Канал организуется на линиях связи, которые являются физической средой распространения сигнала. Основные характеристики канала связи - ширина полосы пропускания и уровень допустимых искажений сигнала. По типу передаваемого сигнала различают аналоговые и цифровые каналы. Появление цифровых каналов связано не с передачей данных, а с внедрением систем цифровой телефонии, с желанием устранить недостатки, присущие каналам тональной частоты (ТЧ-каналам), которые повсеместно использовались в системах телефонной связи. Поэтому структура и характеристики цифровых каналов тесно связаны с технологиями передачи голоса.
Стандартный канал ТЧ используется для передачи телефонных сигналов, а также компьютерных данных, факсимильной и телеграфной связи. Требования, которые предъявлялись к каналам ТЧ при их стандартизации, - обеспечение качественной передачи голосовых сообщений. Для передаваемого речевого сигнала была установлена полоса частот в диапазоне от 300 до 3400 Гц, что соответствовало 90%-ному уровню разборчивости слов и 99%-ному уровню разборчивости фраз, при этом сохранялась удовлетворительная естественность звучания. В первых системах телефонной связи для организации каждого канала использовались отдельные линии связи. Позднее появились технологии мультиплексирования, позволяющие передавать по одной линии несколько телефонных каналов (связисты используют термин “уплотнение”).
Чаще всего в системах аналоговой связи применяется мультиплексирование с частотным разделением каналов. В этом методе из исходных сигналов с помощью систем амплитудного модулирования и полосовых фильтров формируют сигналы, спектры которых занимают неперекрывающиеся диапазоны частот и образуют результирующий сигнал. Каждый телефонный сигнал в таком результирующем объединенном сигнале занимает полосу в 4 кГц. На базе ТЧ-каналов стандартизованы различные групповые тракты, среди них первичный К-12 (12 ТЧ-каналов, 60-180 кГц), вторичный К-60 (60 ТЧ-каналов, 312-552 кГц), третичный К-300 (300 ТЧ-каналов, 812-2044 кГц).
· Основной цифровой канал.
Внедрение систем цифровой телефонии вызвало необходимость представления аналогового сигнала в цифровой форме. Метод, принятый связистами для преобразования аналогового сигнала в цифровой, носит название импульсно-кодовой модуляции (ИКМ). В англоязычной литературе этот термин имеет эквивалент PCM - Pulse Code Modulation. По этому методу аналоговый сигнал представляется в виде последовательности уровней, взятых с определенной частотой (частотой дискретизации), а затем квантуется, т. е. каждому отсчету ставится в соответствие численное значение. Частота дискретизации должна быть такой, чтобы на приемном конце канала можно было восстановить исходный сигнал. Для сигнала с ограниченным спектром частота дискретизации должна не менее чем в два раза превышать максимальную частоту в спектре сигнала (согласно теореме Котельникова - Найквиста). Так, при аналого-цифровом преобразовании стандартного телефонного сигнала, спектр которого ограничен частотой в 4 кГц, частота дискретизации равна 8 кГц, а численное значение преобразованного сигнала представляют в виде 8-бит двоичного кода. Поэтому для передачи стандартного ТЧ-сигнала организуется цифровой канал со скоростью обмена данными 8 кГц х 8 бит = 64 Кбит/с. Этот канал называется основным цифровым каналом или DS0 (Digital Signal level zero). Каналы DS0 - это те кирпичики, из которых строятся более мощные цифровые системы передачи, емкость которых измеряется числом содержащихся в них DS0.
· Проблемы синхронизации. Кодирование данных в канале.
Двоичные последовательности при посылке в линию связи кодируются последовательностью импульсов и пауз. Передача и прием этих последовательностей приемопередающими устройствами привязаны к тактовым импульсам, которые вырабатывают тактовые генераторы этих устройств. Для того чтобы битовые последовательности считывались на принимающем конце без ошибок, тактовые генераторы приемника и передатчика должны быть синхронизированы (в этом случае говорят о тактовой синхронизации между устройствами). Тактовый сигнал, используемый для синхронизации, может быть получен из отдельного источника либо выделен из передаваемого информационного сигнала. С этой целью, а также с целью уменьшить влияние искажений при передаче через линию связи применяют особые методы кодирования данных в канале связи.
· Мультиплексирование с временным разделением каналов.
В цифровой связи для передачи нескольких цифровых потоков по одной линии связи, как и в аналоговых системах, применяется мультиплексирование, но используется другой метод, называемый мультиплексированием с временным разделением каналов. В англоязычной литературе эквивалентный термин - Time Division Multiplexing (TDM). Процедура TDM выглядит так: из входных цифровых потоков мультиплексор поочередно отбирает определенную последовательность бит, добавляет служебную информацию и формирует выходную последовательность. Непрерывную последовательность бит в выходном потоке, принадлежащую определенному входному каналу, называют канальным интервалом или тайм-слотом. На практике наиболее употребительными являются схемы мультиплексирования с байт-интерливингом (чередованием), когда канальный интервал состоит из 8 бит, либо с бит-чередованием, когда на выход последовательно коммутируется по одному биту из каждого канала. Одной только тактовой синхронизации недостаточно для демультиплексирования битовой последовательности, так как в получаемом потоке бит необходимо еще привязаться к началу первого канального интервала на принимающем конце линии. С этой целью при формировании уплотненного потока в него с определенной периодичностью вставляют фиксированную битовую последовательность, которая вместе с группой канальных интервалов, следующих за ней и содержащих равное количество интервалов из каждого входного потока, образует кадр или фрейм (в терминологии связистов “цикл”).
С помощью этой битовой последовательности, выделяя ее как маркер, принимающая аппаратура может привязаться к началу каждого кадра в цифровом потоке. Этот вид синхронизации называют кадровой или цикловой синхронизацией. В цифровых системах несколько кадров объединяют в структуру, называемую сверхкадром (или сверхциклом, по-английски super-frame). Для правильного приема таких структур, кроме тактовой и кадровой синхронизаций, необходима еще и сверхкадровая синхронизация.
Первую систему передачи голоса, использующую ИКМ и мультиплексирование с временным разделением каналов, установила в 1957 г. компания Bell System. В одном канале объединялось 24 цифровых потока по 64 Кбит/с, что с учетом бита кадровой синхронизации и частоты следования кадров 8 кГц давало цифровой поток 24х64+8=1544 Кбит/с. В дальнейшем технология Bell System была стандартизована и теперь известна как канал DS1 (Digital Signal level one) или Т1.
В Европе (в том числе и в России) в качестве стандартной была принята иная схема объединения каналов DS0, известная как первичный цифровой канал Е1. Так как этот стандарт в последнее время широко используется для подключения к сетям операторов связи корпоративных телефонных систем и систем передачи данных, рассмотрим его подробнеe.
· Первичный цифровой канал Е1.
Канал Е1 объединяет 32 канала DS0, из которых один DS0 используется для кадровой синхронизации, другой - для сигнализации. Кадр этого потока состоит из 32 канальных интервалов по 8 бит каждый. Частота следования кадров 8 кГц, что дает скорость потока 32х8х8=2048 Кбит/с. Кадры потока Е1 объединяются в сверхкадр. Количество кадров в сверхкадре зависит от типа сигнализации, используемой в Е1. Под сигнализацией понимают информацию, необходимую коммуникационным устройствам для выполнения их функций, например установление и разрыв телефонных соединений.
Обычно применяются два типа сигнализации: CAS (Channel Associated Signalling) и CCS (Common Channel Signalling).
В первом случае сверхкадр состоит из 16 кадров (с 0 по 15) и передается 2 мс. Тайм-слот 0 (TS0) содержит биты покадровой синхронизации и другую служебную информацию. Тайм-слот 16 (TS16) начиная с первого кадра используется для передачи сигнализации, связанной с каждым из каналов (отсюда название Channel Associated Signalling). Остальные тайм-слоты передают собственно информацию. Тайм-слоты с 1 по 15 соответствуют каналам с 1 по 15, а таймслоты с 17 по 31 каналам с 16 по 30. Распределение сигнализации TS16 по каналам происходит следующим образом: старшие 4 бита TS16 кадра 1 в сверхкадре соответствуют сигнализации первого канала, младшие 4 бита - сигнализации 16-го канала; старшие 4 бита TS16 кадра 2 соответствуют сигнализации второго канала, младшие - сигнализации 17-го канала и т. д. В нулевом кадре тайм-слот 16 используется для организации сверхкадровой синхронизации.
В случае общеканальной (ССS) сигнализации сверхкадр состоит из двух кадров. Тайм-слот 0 служит для организации кадровой синхронизации, как и в CAS, а тайм-слот 16 образует общий для всего потока канал сигнализации. В случае передачи через Е1 только данных, когда сигнальная информация передается в заголовках пакетов данных и отдельный тайм-слот для этого не нужен, TS16 можно задействовать для передачи данных и он будет соответствовать каналу 31.
· Плезиохронная цифровая иерархия - PDH.
Метод мультиплексирования с разделением по времени может быть применен и для первичных цифровых каналов Е1 или Т1. Несколько таких каналов могут быть объединены в один канал с более высокой скоростью передачи - в так называемый вторичный цифровой канал. Несколько вторичных каналов аналогичным образом могут быть объединены в еще более высокоскоростной третичный канал и т. д. Таким образом можно сформировать различные иерархические наборы скоростей передачи, в зависимости от количества цифровых потоков, подаваемых на вход мультиплексора на каждом этапе мультиплексирования. В мире существуют две стандартные цифровые иерархии: североамериканская и европейская. Ниже представлены скоростные ряды и схемы мультиплексирования для каждой из иерархий.
Скорости цифровых потоков одной и той же ступени иерархии, которые образованы цифровыми системами передачи, расположенными на различных узлах сети и имеющими независимые источники синхронизации, могут несколько отличаться в пределах допустимой нестабильности тактовых генераторов. Так как эта нестабильность невелика, то объединяемые потоки называют плезиохронными (почти синхронными), а иерархию цифровых систем на основе объединения плезиохронных потоков называют плезиохронной цифровой иерархией (Plesiochronous Digital Hierarchy, PDH).
Для объединения таких потоков используется схема мультиплексирования с бит-чередованием, а для выравнивания скоростей, когда расхождения накапливаются, используется либо вставка бит (stuffing, стаффинг), либо исключение бит (исключенные биты передают в битах служебной информации). Этот процесс называется согласованием скоростей. Для того чтобы правильно демультиплексировать такой поток, кроме синхронизирующей последовательности в него включается дополнительная информация о согласовании скоростей. В канале Е2 количество такой служебной информации (вместе с синхронизирующей последовательностью) составляет 32 бита на кадр, частота следования кадров как и у Е1 - 8 кГц, что дает результирующую скорость потока 2048х4++32х8=8448 Кбит/с, Е3 содержит 36 бит служебной информации, но частота кадров у него 16 кГц (в два раза выше, чем у Е1 или Е2), поэтому его скорость равна 8448х4+36х16=34368 Кбит/с, у Е4 частота следования кадров 64 кГц, служебных бит 28, что дает 34368x4+28x64==139 264 Кбит/с.
· Синхронная цифровая иерархия – SDH.
Системы PDH стали применяться не только для организации телефонных каналов, но и для передачи данных. Однако наличие в PDH-потоках выравнивающих бит делает невозможным прямое извлечение из потока составляющих его компонентов. Так, чтобы извлечь из потока Е4 поток Е1, необходимо демультиплексировать Е4 на четыре Е3, затем один из Е3 на четыре Е2, и только после этого можно вывести требуемый Е1. А для организации ввода-вывода требуется три уровня мультиплексирования/демультиплексирования. Понятно, что использование систем PDH в сетях передачи данных требует большого количества мультиплексоров, что значительно повышает стоимость и усложняет эксплуатацию сети. Этот недостаток PDH можно устранить, если сделать объединяемые потоки синхронными, т. е. использовать для сетевых устройств синхронизацию от одного высокоточного источника.
В 80-х гг. были разработаны стандарты (ITU-T G.707, G.708, G.709) для волоконно-оптических линий связи на иерархию синхронной оптической сети SONET в США и на синхронную цифровую иерархию SDH в Европе, а также стандарты на соответствующие интерфейсы для стыковки оборудования.
В сетях SDH и SONET используются синхронные схемы передачи с байт-чередованием при мультиплексировании. В качестве формата основного сигнала первого уровня в иерархии SDH был принят синхронный транспортный модуль STM-1 со скоростью 155.52 Мбит/с. Мультиплексирование с коэффициентом кратности 4 дает следующий ряд скоростей SDH иерархии: STM-4, STM-16, STM-64 или соответственно 622,08, 2488.32, 9953.28 Мбит/с. Ряд скоростей SONET начинается с сигнала ОС-1 на 51,84 Мбит/с, а далее сигналы ОС-3, ОС-12, ОС-48 совпадают по скорости с STM-1, STM-4, STM-64. Отметим, что выбор скорости 155.52 Мбит/с для STM-1 (или 51.84 для ОС-1) был не случаен. Это было сделано при разработке стандартов SONET/SDH для примирения американской и европейской систем PDH и позволило мультиплексировать потоки той и другой иерархий в STM-1.
Мультиплексирование STM-1 в STM-N осуществляется каскадно: 4хSTM-1 = STM-4, 4хSTM-4 = STM-16, 4хSTM-16 = STM-64, так и непосредственно: 16хSTM-1 = STM-16, 64хSTM-1 = STM-64.
Кадр STM-1 имеет 2430 байт и представляется в виде матрицы размером в 9 строк и 270 столбцов. Первые 9 столбцов составляют байты секционного заголовка (Section Оverhead, SOH), которые содержат байты служебных каналов, индикации ошибок передачи, управления синхронизацией, идентификации наличия STM-1 в кадре STM-N, а также указатель на начало административного блока в поле полезной нагрузки, в котором размещаются виртуальные контейнеры четвертого или третьего уровней (речь о них пойдет ниже). Поле полезной нагрузки состоит из оставшихся 261 столбца. Учитывая, что частота следования кадров STM-1 равна 8 кГц, получаем скорость полезной нагрузки 9х261х8х8 = 150 336 Кбит/с.
Синхронные сети не смогли бы получить широкого распространения, если бы они не обеспечивали совместимости с иерархией PDH. Поэтому стандартами SDH определена поддержка в сетях доступа сигналов PDH (исключение для европейской иерархии составил сигнал Е2). Для передачи в общем случае несинхронных PDH-потоков в поле полезной нагрузки синхронного транспортного модуля была разработана специальная схема мультиплексирования. По этой схеме кадры потоков PDH отображаются в контейнеры фиксированного размера С-n (C-11 для Т1, С-12 для Е1, С-31 для Е3, С-32 для Т3 и С-4 для Е4). Контейнеры С-n снабжаются маршрутными заголовками (Path Overhead, POH), содержащими управляющую информацию и статистику о прохождении контейнера. Такие контейнеры (снабженные РОН) получили название виртуальных контейнеров (VC) и, в зависимости от уровня соответствующего им PDH сигнала, различают виртуальные контейнеры первого, третьего и четвертого уровней. В виртуальные контейнеры третьего и четвертого порядка вместо С-n могут входить группы компонентных блоков (TUG). Для устранения несинхронности входных потоков каждому виртуальному контейнеру приписывается указатель с информацией о положении виртуального контейнера в поле полезной нагрузки, т. е. виртуальный контейнер не привязан жестко к определенному месту в поле полезной нагрузки, а может как бы плавать в нем. Приведена европейская схема мультиплексирования потоков T1, E1, E3, T3 и Е4 в STM-N, которая является частью общей схемы мультиплексирования PDH-сигналов в технологии SDH. Из этой схемы легко увидеть, что в STM-1 может быть мультиплексировано до 63 потоков Е1, до трех Е3 и один Е4.
· Сети SDH.
Основные типы оборудования, применяемые в сетях SDH, можно разделить на терминальные мультиплексоры, мультиплексоры ввода-вывода и коммутаторы (или кросс-коннекторы). Это деление условно, так как большинство выпускаемых SDH-устройств сочетают в себе несколько функций.
Терминальный мультиплексор (TM) предназначен для мультиплексирования и демультиплексирования сигналов PDH и STM (в терминологии SDH их называют трибутарными или компонентными интерфейсами) в агрегатный поток STM-N. Он также может осуществлять локальную коммутацию с одного трибутарного интерфейса на другой. Мультиплексоры ввода-вывода (ADM) имеют на входе те же наборы интерфейсов, что и ТМ, и, как правило, два агрегатных потока STM-N (условно называемых “восточный” и “западный”). В этих мультиплексорах часть данных из агрегатных потоков выводится на трибутарный интерфейс, другая часть вводится (добавляется) с трибутарного интерфейса для последующей передачи, остальной трафик проходит через устройство без какой-либо дополнительной обработки. Кросс-коннектор (DSX) - распределительный узел сети, имеющий несколько однотипных интерфейсов STM-N и осуществляющий между ними коммутацию виртуальных контейнеров различного уровня.
Основные конфигурации сетей SDH - точка-точка, линейная цепь и кольцо, хотя применяются и другие топологии, например ячеистая.
Контроль целостности сетей SDH осуществляется с помощью информации, переносимой в служебных байтах заголовков (SOH, POH). Один из способов - резервирование участков сети по схеме 1+1 на разнесенных трассах оптического кабеля. По этой схеме повреждение кабеля на одном участке сети вызывает автоматическое переключение на резервный участок. Однако наиболее популярная топология - самовосстанавливающееся кольцо. При разрыве в кольце служебные байты пострадавших линий сигнализируют о невозможности прохождения трафика. В ответ на это ближайшие узлы перенаправляют потоки с поврежденного участка в обход по кольцу. Весь процесс занимает доли секунды. Естественно, резко увеличивается трафик в неповрежденном участке кольца, поэтому при проектировании самовосстанавливающихся колец предусматривают резерв пропускной способности.
Надежность сетей SDH, их способность к самовосстановлению, возможность поддержки потоков в широком диапазоне скоростей, развитые средства конфигурирования, мониторинга и администрирования привели к широкому использованию SDH.
Применение SDH-технологии:
• Транспортировка потоков данных в АТМ сетях. При этом SDH-оборудование обеспечивает передачу сигнала на большие расстояния, осуществляет кросс-соединение АТМ-потоков и позволяет организовать АТМ-сети со сложной топологией даже для линейного расположения АТМ-коммутаторов
• Передача большого числа Е1 потоков, связывающих АТС наиболее дешевым способом (главным образом для нужд ТФОП)
• Создания отказоустойчивых транспортных сетей с быстрым временем восстановления работоспособности (по этому показателю SDH значительно превосходит другие технологии). Необходимо отметить, что SDH не следует рассматривать как альтернативу АТМ, так как SDH обеспечивает только передачу потоков данных и требует применения внешних коммутирующих устройств (АТС, IP-маршрутизаторы, АТМ-коммутаторы и т. д.), в то время как АТМ может осуществить не только передачу, но и коммутацию.
По мере распространения SDH-технологий при объединении сетей различных операторов связи остро встает проблема глобальной синхронизации узлов, и этот момент нельзя недооценивать.
Тенденция последних лет - вытеснение существующих ныне систем PDH сетями SDH, а также использование этой технологии не только операторами связи, но и для построения магистралей корпоративных информационных систем.
С начала 90-х годов в странах СНГ (Россия, Украина, Казахстан и др.) развернуты и полномасштабно функционируют десятки крупных сетей SDH. Технология SDH активно продвигается а регионы. На ее основе происходит крупномасштабное переоборудование старой аналоговой сети связи в цифровую взаимоувязанную сеть. С течением времени под влиянием новых требований пользователей (Интернет, создание частных виртуальных сетей, удаленный доступ и т. д.) компании связи, развернувшие в регионе цифровую сеть SDH для транспорта коммутируемых телефонных каналов, осознают необходимость своего участия на данном рынке услуг и получения новых источников доходов. И, таким образом, наметился переход многих региональных операторов связи от предоставления транспорта телефонии к предоставлению полномасштабных (или частичных) сервисных услуг с гарантированным качеством.
Теперь, чтобы уяснить цель данного дипломного проекта, необходимо чуть подробнее обсудить структурную схему магистрали SDH-сети, а также структуру виртуального контейнера первого уровня STM-1. Упрощенно стуктуру магистрали можно показать так, как это сделано на рис. 1.1.
Рис.1.1
В общем случае, одна станция в какой-то момент времени может являться передатчиком (Tr -transmitter), а другая – приемником (Rc – reciever). При этом также необходимы регенераторы – узлы, борющиеся с затуханием сигнала в линии передач, причем конструктивное исполнение представляется удобным выполнить на основе точно таких же станций, что и приемник с передатчиком. Понятно, что отнюдь не все станции уместно сопрягать с ПЭВМ (Ws - workstation) посредством неких F-интерфейсов – это дорого и нерационально- поэтому в процессе эксплуатации такой магистрали возникает необходимость сообщений с регенераторами, а также со всеми станциями, не сопряженными с ПЭВМ посредством самой SDH- магистрали. Разумно для таких целей выделить служебные каналы, и сейчас мы увидим, что такие каналы уже существуют- они заранее предусмотрены в структуре первичного транспортного модуля STM-1 (рис. 1.2).
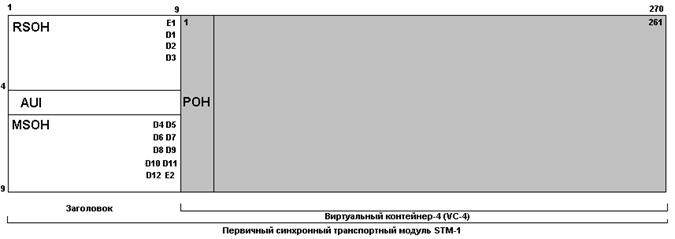
Рис.1.2
Структурно
первичный контейнер можно представить в виде виртуального контейнера четвертой
ступени, снабженного заголовком SOH.
Заголовок в STM-1 составляет
9х9=81 байт.Заголовок
состоит в свою очередь из 4х9=36 байтов TRSOH—эта часть SOH предназначена для сообщения с
регенераторами, 9 байтов AUI-указателя,
который адресует первый байт цифрового модуля, содержащего полезную нагрузку (VC-4 в данном случае), и 36 байтов MSOH—эта часть заголовка предназначена для
сообщения с приемниками/передатчиками. Необходимо акцентировать внимание на
универсальности каналов, организуемых на основе SOH—по ним
возможно передавать как данные, так и речь—допустим, для организации голосовой
связи между операторами сети. Для этого в заголовке есть байты двух типов—D и E (см. также
рис.1). Байты D (D1..D12) предназначены для передачи данных, а байты E (E1..E3)
– для передачи речи. Таким
образом, можно организовать служебный голосовой канал скоростью .
.
Следует отметить, что SDH-сеть является достаточно сложной, разветвленной структурой, и осуществлять мониторинг и управление этой сетью- задача непростая. Аналогичные сложности возникают при управлении любой сетью связи. Попытки создать универсальную модель управления сетями привели к созданию концепции Telecommunication Management Network (TMN)- телекоммуникационной сети управления. Концепция управляющей сети TMN рассматривается в следующей главе.
Постановка задачи: разработать контроллер доступа к встроенным каналам, обеспечивающий передачу управляющей информации TMN согласно рекомендациям ITU-T G.704 [21].
2. УПРАВЛЕНИЕ СЕТЬЮ: ФУНКЦИОНИРОВАНИЕ, АДМИНИСТРИРОВАНИЕ И ОБСЛУЖИВАНИЕ.
Функционирование любой сети (и сети PDH и SDH/SONET не являются исключением) невозможно без ее обслуживания на различных уровнях. Обслуживание сети сводится в общем случае к автоматическому, полуавтоматическому или ручному управлению системой, ее тестированию и сбору статистики о прохождении сигнала и возникающих неординарных или аварийных ситуациях, а также менеджменту (или административному управлению системой). Эти функции в свою очередь невозможно осуществить без сигнализации различного рода о состояниях системы, например сигнализации о возникновении аварийного состояния. Сигнализация должна осуществляться по специальным встроенным или зарезервированным для этого каналам, связывающим управляющие (оперирующие на сети) системы OS и управляемые системы или сетевые элементы NE.
Для решения задач управления (на всех уровнях: физическом, логическом, информационном и административном, из которых два последних относят к особой категории управления - менеджменту) необходимо разработать модель сети и описать типы интерфейсов связи, необходимые для реализации функций управления на различных участках сети.
В отличие от существующих систем PDH, не имеющих стандартного описания модели и интерфейсов и специальных (стандартизованных) управляющих каналов связи, системы SDH имеют свои системы управления - SMN, опирающиеся на достаточно проработанную в настоящее время систему стандартов, описывающих модель, интерфейсы, схему взаимодействия и функции блоков и каналов управления.
2.1. ЧЕТЫРЕХУРОВНЕВАЯ МОДЕЛЬ УПРАВЛЕНИЯ СЕТЬЮ
Общая схема сети управления телекоммуникациями (TMN) может быть представлена четырехуровневой моделью управления, где каждый уровень выполняет определенную функцию, представляя верхнему уровню последовательно обобщаемую нижними уровнями картину функционирования сети. Это следующие уровни:
• бизнес-менеджмент (верхний уровень управления экономической эффективностью сети - BOS).
• сервис-менеджмент (уровень управления сервисом сети - SOS);
• сетевой менеджмент (уровень систем управления сетью - NOS);
• элемент-менеджмент (нижний уровень элемент-менеджеров ЕМ или систем управления
элементами сети EOS).
Функционирование каждого верхнего уровня в этой иерархии основано на информации уровня. лежащего ниже, передаваемой через интерфейс между этими уровнями.
Элемент-менеджер ЕМ осуществляет управлением отдельными элементами сети NE. т.е оборудованием (мультиплексорами, коммутаторами, регенераторами и.т.д.) сети. Его задачи:
- конфигурация элементов сети - установление параметров конфигурации, например, назначение каналов, распределение трибных интерфейсов, установка реального времени;
- мониторинг - определение степени работоспособности (статуса), сбор и обработка сигналов о возникновении аварийных ситуации (алармов - А), несущих информацию типа “в элементе сети NE, произошла ошибка А”;
- управление функцией передачи - управление операционными параметрами, отвечающими за функционирование сети, а именно: проверка состояния интерфейсов, активация систем защиты для переключения на резервное оборудование;
- управление функциями TMN - управление потоками сигналов о возникновении аварийных состояний, адресация возникающих при этом сообщений, формирование критериев фильтрации ошибок, маршрутизация пакетов сообщений по служебным каналам, формируемым за счет SOH в фреймах SDH, генерация и мониторинг сигналов синхронизации;
- тестирование элементов сети - проведение тестов, характерных для данного типа оборудования:
- локализация NE в рамках выделенного слоя - осуществление сервиса NE и обработка
информации от NE, специфических для данного слоя.
Функции ЕМ могут интерпретироваться как независимые функции OS, осуществляемые конкретными NE с помощью данного ЕМ через сервисные интерфейсы, поддерживаемые данной OS. Для осуществления этих функций все NE должны быть известны и различаемы для конкретной OS. Если несколько OS реализуют одни и те же сервисные интерфейсы, то в этом случае функции элемент-менеджмента могут быть распределены по нескольким OS^, как это показано ниже на рис.2-1.
Сетевой менеджер NM, или система управления сетью NMS, призваны управлять сетевым уровнем, или сетью в целом. На этом уровне менеждер абстрагируется от отдельных элементов сети, рассматриваемых с точки зрения выполнения задач, управляемых элемент-менеджером. Это не значит, что NM их не видит, они рассматриваются здесь как элементы, поддерживающие сетевые связи - маршруты в терминологии SDH. NM использует следующие функции NE:
- функцию связи, осуществляемую всеми элементами, имеющими возможность кросс-коммутации;
- функцию доступа к мультиплексору, осуществляемую всеми мультиплексорами;
- функцию секции передачи, реализуемую между точками связи или между точкой связи и мультиплексором.
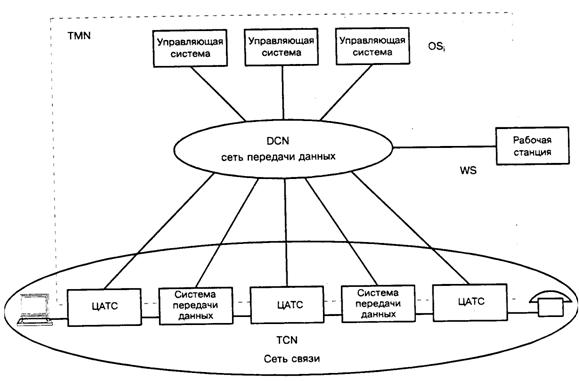
Рис.2-1. Общая схема управления телекоммуникационными сетями TCN
Сетевой менеджер осуществляет следующие функции:
-мониторинг - проверка маршрута передачи с использованием функции проверки окончания маршрута, проверка качества передачи и самой возможности связи, при этом NE используются либо непосредственно самой OS, либо через операционную систему ЕМ;
-управление сетевой топологией - управление функцией связи для переключения маршрутов передачи (в том числе и в результате сбоев и последующего восстановления маршрута);
-локализация в рамках выделенного слоя - осуществление сервиса NM и обработка
: информации от NE, специфических для данного слоя. Как и в любом слое NM обеспечивает маршруты для слоя SM.
Сервис-менеджер обеспечивает традиционные для сетей виды сервиса - телефонный сервис, передачу данных различного вида и др. Он выполняет следующие функции:
-мониторинг - проверка возможности осуществления сервиса, а также доступности маршрутов передачи, подготовленных в слое NM;
-управление - управление характеристиками сервиса, а также формирование запросов сетевому уровню на изменение маршрутов передачи;
-локализация в рамках выделенного слоя - осуществление сервиса SM и обработка
информации от NM.
SM также обеспечивает информацию о новых видах сервиса для слоя ВМ. Бизнес-менеджер обеспечивает мониторинг и управление типами сервиса, а также формирование запросов на уровень сервиса, лежащий ниже, на изменение вида сервиса.
2.2. СЕТЬ УПРАВЛЕНИЯ ТЕЛЕКОММУНИКАЦИЯМИ TMN
Сетевойэлемент и сервис-менеджеры формируют то, что принято сейчас считать ядром сети управления телекоммуникациями— TMN. TMN обеспечивает функции менеджмента и управления для телекоммуникационных сетей и сервиса и предлагает связь между TMN и этими сетями и сервисом .
3.2.1. Концепция TMN и общая схема управления
Основная концепция TMN заключается в формировании такой архитектуры, которая позволит связать различные типы управляющих систем OS - EOS, NOS, SOS, как между собой, так и с элементами сети NE (сетевым оборудованием) для обмена управляющей информацией с помощью стандартных интерфейсов, протоколов и сообщений.
Общая схема управления телекоммуникационными сетями TCN с помощью сети управления TMNприведена на рис.2-1. Здесь OS, могут быть связаны между собой через общую сеть передачи данных DCN (управляемую рабочей станцией WS), которая также связывает их с различным аналоговым и цифровым телекоммуникационным оборудованием, объединенным в общую телекоммуникационную сеть TCN. Предполагается, что TMN будет поддерживать пять типов менеджмента и управления:
- управление рабочими характеристиками систем;
- управление отказами и обеспечение надежности работы систем;
- управление конфигурацией систем;
- менеджмент бухгалтерской отчетности и тарификации (биллинга) в системе;
- управление безопасностью систем и обеспечение конфиденциальности информации, циркулирующей в них.
2.2.2. Архитектура TMN
Архитектура TMN рассматривается в трех аспектах:
-функциональном, определяющим состав функциональных блоков, позволяющий реализовать сеть TMN любой сложности;
-информационном, основанном на объектно-ориентированном подходе и принципах OSI;
-физическом, описывающем реализуемые интерфейсы и примеры физических компонентов TMN.
2.2.2.1. Функциональные блоки и их компоненты
TMN включает ряд функциональных блоков, выполняющие следующие одноименные функции (в скобках даны термины, используемые в русских пеоеводах стандартов ITU-T): OSF - функции управляющей (операционной) системы OS; MF- функция устройств сопряжения М (медиаторная функция); NEF - функция сетевого элемента NE; QAF - функция Q-адаптера QA; WSF - функция рабочей станции WS.
Для передачи информации между указанными блоками TMN используется функция передачи данных DCP. Пары функциональных блоков, обменивающихся информацией, разделены между собой опорными (или интерфейсными) точками. Три из указанных блоков, выполняющих функции NEF. QAF и WSF, принадлежат TMN лишь частично (рис.2-2).
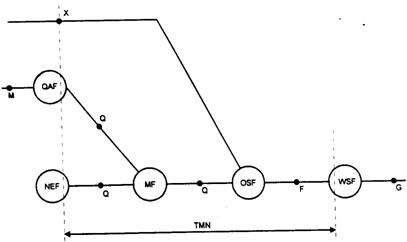
Рис.2-2. Типы и положение интерфейсов в схеме управления сетью
функциональные блоки не только выполняют указанные функции, но и содержат дополнительные функциональные компоненты, реализующие определенные функции, а именно: Блок OSF - обрабатывает управляющую информацию с целью мониторинга и/или управления, а
также реализует функцию управляющего приложения OSF-MAF;
Блок MF - обрабатывает информацию, передаваемую между блоками OSF и NEF (или QAF), позволяя запоминать, фильтровать, адаптировать и сжимать информацию, а также реализует функцию управляющего приложения MF-MAF;
Блок NEF - включает функции связи, являющиеся объектом управления, а также реализует функцию
управляющего приложения NEF-MAF;
Блок QAF - подключает к TMN логические объекты класса NEF или QSF, не являющиеся частью TMN, осуществляя связь между опорными точками внутри и вне TMN, а также реализует функцию управляющего приложения QAF-MAF;
Блок WSF - позволяет интерпретировать информацию TMN в терминах, понятных пользователю управляющей информации.
Дополнительные функциональные компоненты, игравшие ранее самостоятельную роль в качестве блоков TMN, теперь включены в состав функциональных блоков. К ним относятся:
MAF - функция управляющего приложения - фактически осуществляет управляющий (административный) сервис TMN, может играть роль либо Менеджера, либо Агента, используется в функциональных блоках MF, NF, OSF и QSF (см. п.З-2.2.2);
М1В -база управляющей информации • играет роль репозитария (информационного архива) управляющих объектов, не является объектом стандартизации TMN, используется в схеме дистанционного мониторинга RMON, а также протоколом SNMP, применяется во всех, кроме WSF, функциональных блоках;
ICF - функция преобразования информации - используется в промежуточных системах для трансляции информационной модели с интерфейса на интерфейс, используется в функциональных блоках MF, OSF, QAF;
PF - функция представления - преобразует информацию к удобному для отображения виду,
используется в функциональном блоке WSF;
НМА -человеко-машинная адаптация - преобразует информацию MAF к удобному для отображения виду, используется в функциональных блоках OSF, MF;
MCF -функция передачи сообщения - используется для обмена управляющей информацией,
содержащейся в сообщении, используется во всех функциональных блоках;
DCF - функция передачи данных - используется для передачи информации между блоками, наделенными управляющими функциями.
Опорные точки сети TMN
В сети TMN вводятся опорные (интерфейсные) точки, определяющие границы сервиса. Эти точки делятся на две группы. Первая - включает точки внутри TMN, вторая - вне ее. Точки первой группы делятся на три класса:
- q - точки между блоками OSF, QAF, MF и NEF, обеспечивают информационный обмен между блоками в рамках информационной модели, описанной в стандарте ITU-T М.3100; эти точки делятся на два типа:
- qx - точки между двумя блоками MF или блоком MF и остальными блоками;
- qз - точки между двумя блоками OSF или блоком OSF и остальными блоками;
- f - точки для подключения блоков WSF к OSF и/или к MF, подробнее описаны в рекомендации ITU-
Т Rec. М.ЗЗОО;
- х - точки между OSF, принадлежащих двум TMN. Точки второй группы делятся на два класса:
- д -точки между WSF и пользователем (см. определение в стандарте ITU-T Rec. Z.300;
- m - точки между QAF и управляемым объектом, не принадлежащем TMN.
В соответствии с положением указанных опорных точек определяется положение соответствующих им интерфейсов TMN, обозначаемых заглавными буквами. Оно показано на рис.2-2 и рис.2-4. Пунктиром на рис.З-2 отмечены границы TMN. В соответствии с ними интерфейсы Q и F являются внутренними для TMN, интерфейс Х - пограничным, а интерфейсы М и G- внешними.
Функция передачи данных DCF
Основная цель DCF - создать транспортный механизм для передачи информации между блоками, наделенными управляющими функциями (рис.2-3). В нашем случае это функции TMN блоков А и В. Характер взаимодействия между ними равноправный (одноранговый). Механизм взаимодействия осуществляется путем ретрансляции DCF на уровне OSI. Этот механизм может обеспечить все функции, характерные для первых трех уровней модели OSI (физического, звена передачи данных и сетевого), или их эквивалент.
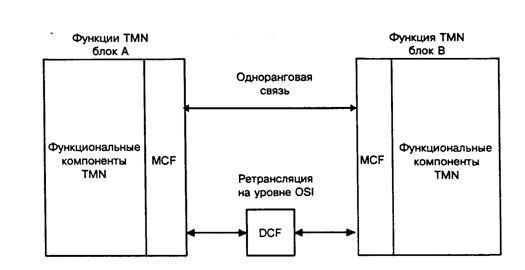
Рис.2-3. Соотношение между функциями передачи данных DCF и сообщений MCF
Внешний доступ к TMN
Доступ к TMN должен быть как со стороны другой такой же TMN, так и со стороны пользователя сети. Схема такого доступа и взаимодействия двух сетей TMN приведена на рис.2-4. При организации доступа пользователя должны быть предусмотрены стандартные в таких случаях процедуры, включая меры защиты, преобразование протоколов, трансляцию функций и сервисное обслуживание.
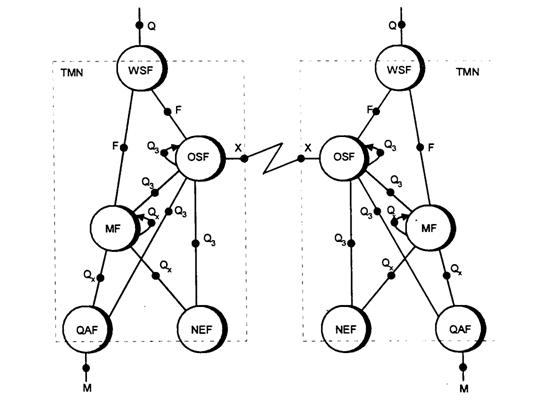
Рис.2-4. Типы и положение интерфейсов между блоками управляющих функций
2.2.2.2. Информационный аспект архитектуры
При создании информационной модели обмена данными (сообщениями) в TMN используется объектно-ориентированный подход (ООП) и концепция Менеджер/Агент.
ООП рассматривает управление обменом информацией в TMN в терминах Менеджер - Агент -Объекты. Менеджер (рис.2-5), представляя управляющую открытую систему, издает в процессе управления управляемой открытой системой директивы и получает в качестве обратной связи от объекта управления уведомления об их исполнении. Директивы, направленные от Менеджера к объекту, доводятся до объекта управления Агентом. Уведомления, направленные от объекта к Менеджеру, доводятся до Менеджера тем же Агентом.
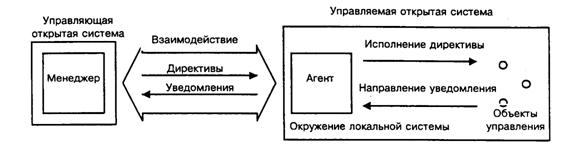
Рис.2-5. Схема взаимодействия между Менеджером, Агентом и объектами
Один Менеджер может быть вовлечен в информационный обмен с несколькими Агентами и, наоборот, один Агент может взаимодействовать с несколькими Менеджерами. Агент может игнорировать директивы Менеджера по соображениям нарушения секретности доступа к объекту или другим причинам. Все взаимодействие между Менеджером и Агентом осуществляется на основе использования протокола общей управляющей информации СМIР и сервиса общей управляющей информации CMIS, описанных в рекомендациях ITU-T Rec. Х.711 и ITU-T Rec. Х.710.
2.2.2.3. Общий аспект архитектуры TMN
Функциональный и информационный аспекты взаимодействия систем на основе TMN, кратко описанные выше, являются хорошей основой для рассмотрения общего аспекта или собственно архитектуры TMN. На рис.2-6 представлен простой пример такой архитектуры управления сетями, где функциональные блоки представлены выполняющими только свои обязательные функции (NEF, MF, QAF, OSF, WSF для NE, MD, QA, OS и WS соответственно). Эти блоки могут выполнять и другие (необязательные) функции.
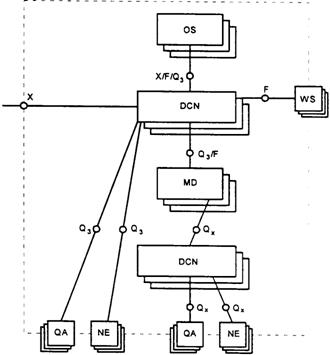
Рис.2-6, Общая архитектура управления телекоммуникационными сетями
В этой схеме (рис.2-6) управляющая система OS взаимодействует с телекоммуникационными сетями через три типа интерфейса, соответствующие опорным точкам: X, F, Q3. Взаимодействие осуществляется через сеть передачи данных DCN, реализующую протоколы уровней OSI 1-3 и поддерживающую функцию DCF. DCN может состоять из нескольких связанных между собой подсетей различного типа. Например, это могут быть подсети, образованные каналами связи данных типа DCC в сетях SDH.
Через интерфейс F сеть DCN связана с рабочей станцией WS, играющей роль монитора управляющей системы. Интерфейс Х связывает DCN с "внешним миром", через интерфейс Q3 DCN может быть напрямую связана с сетевым элементом NE или с О-адаптером QA, позволяющим подключать оборудование, имеющее несовместимые с TMN интерфейсы. Наконец, через интерфейсы Оз и F сеть DCN подключается к устройствам сопряжения MD.
Устройства MD, в свою очередь, через интерфейс Q3, подключаются к другим DCN или к подсетям той-же DCN, которые через интерфейсы Q, связаны напрямую с NE и QA.
Протоколы TMN
Кроме указанных выше протоколов CMIP, CMIS, существуют группы протоколов, поддерживающих каждый из указанных выше интерфейсов: Q3, Qx, Х и F. Выбор протокола зависит от требований по реализации данной физической конфигурации. Прикладной уровень (верхний уровень семиуров-невой модели взаимодействия открытых систем OSI/ISO) является общим для всех групп протоколов, причем он не всегда требуется. Для интерфейса Оз на верхних уровнях (с 4 по 7) модели OSI используются протоколы в соответствии с рекомендацией ITU-T Нес. 0.812, на нижних уровнях (с 1 по 3) - в соответствии с рекомендацией ITU-T Rec. 0.811. При этом первые три уровня требуются практически всегда, так как транспорт сообщений TMN осуществляется протоколами сетевого уровня.
Для оборудования, не имеющего такого интероперабельного интерфейса как О-интерфейс, приходится конвертировать используемые протоколы и сообщения в формат соответствующего интероперабельного интерфейса. Такая конвертация осуществляется MCF, а также QAF, которые могут быть реализованы в QA, NE, MD или OS.
Примеры реализации DCN
В сетях SDK, использующих концепцию Менеджер-Агент, взаимодействие DCN реализуется с использованием МСР. На рис.2-7а,б приведены два примера реализации таких сетей, обеспечивающих функцию DCF в среде SDH. Объединяющий овал на рисунке указывает, что оба интерфейса имеют объединеный транспорт.
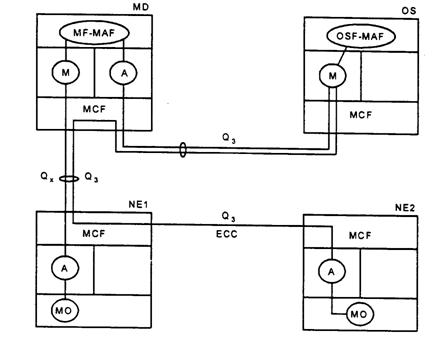
Рис.2-7а. Примеры TMN для управления сетью SDH
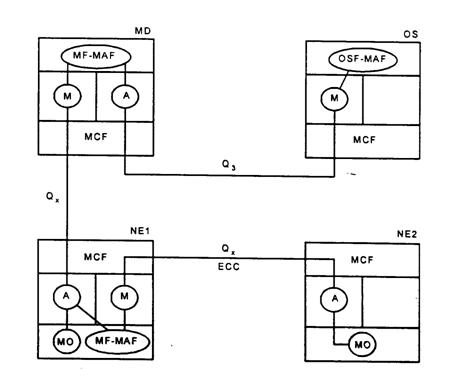
Рис.2-7б. Примеры TMN для управления сетью SDH
В первом примере Менеджер управляющей системы OS, реализует функцию управляющего приложения OSP-MAP и управляет, используя интерфейс С)з и встроенные каналы управления ЕСС, устройством сопряжения MD и элементами сети NE1 и NE2 через MCF. Кроме этого, через интерфейсы Ñ)ç и Ox реализуется и стандартная для концепции Менеджер-Агент схема управления устройствами MD, NE1 и управляемым объектом МО.
Во втором примере используется только эта стандартная схема управления всеми устройствами, поддержанная функцией MF-MAP и осуществляемая через интерфейсы Оз и Qx-
2.3. Общая схема управления сетью SDH
В свете вышесказанного, рассмотрим более подробно схему управления сетью SDH. Схема организационного управления сетью (рис.2-8) многоуровневая. Нижний уровень этой схемы включает SDH NE, которые обеспечивают транспортный сервис. Функции MAF внутри них осуществляют связь с одноранговыми NE и поддержку управления ими, а также устройствами MD и управляющей системой OS.
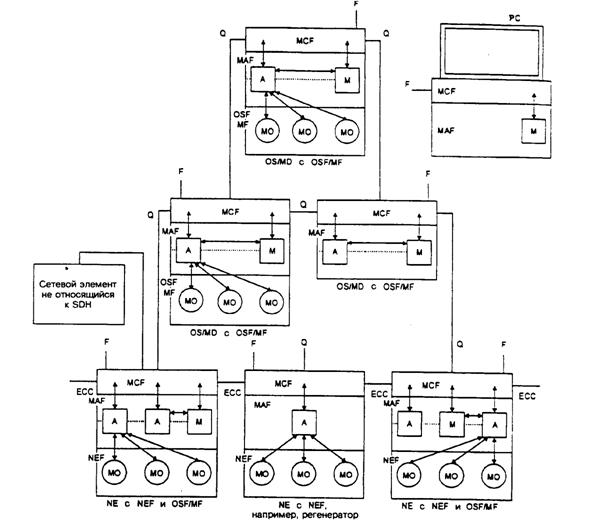
Рис.2-8. Общая схема управления сетью SDH
На схеме используются следующие обозначения:
MCF - функция передачи сообщения;
А – агент;
MAF – функция
управляющего приложения
М – менеджер
NEF – функция
сетевого элемента;
МО - управляемый объект;
ЕСС - встроенный
канал управления;
F, Q – интерфейсы;
Нижний уровень состоит из трех сетевых элементов и в целом напоминает рис.З-86 (два нижних блока). В каждом элементе логически выделены три функции: MCF, MAP и NEF, причем MAF каждого элемента может включать Агент или Менеджер или их оба. Управляющее сообщение, поступающее по ЕСС через интерфейсы F и Q или от элемента другой (не SDH) сети, передается с помощью MCF, затем интерпретируется с помощью MAF и через Агента, интерпретирующего NEF, передается на управляемый объект МО. Реакция объекта передается обратно через Агента и Менеджера в канал ЕСС, или через интерфейсы F и Q на средний уровень - MD, взаимодействующий непосредственно с OS, которая управляется от ЕМ или NMS. Формат сообщений в такой многоуровневой структуре поддерживается одинаковым, как при движении по горизонтали - NE-NE, так и по вертикали: NE-MD, MD-OS.
2.3.1 Подсеть SMS сети управления SMN
Сеть управления SDH (SMN), будучи сама составной частью TMN, состоит из нескольких подсетей SMS. Архитектура SMS и их взаимодействие с TMN приведены на рис.2-9.
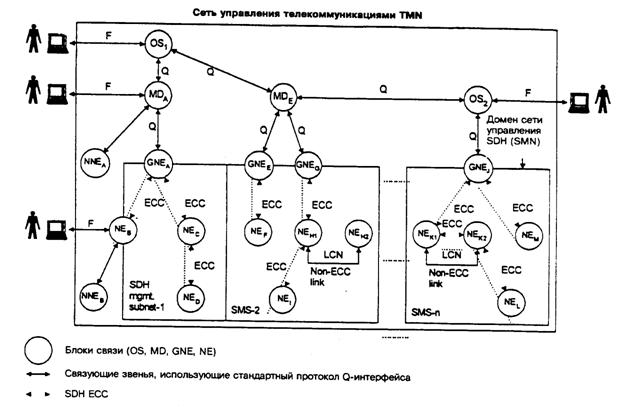
Рис.2-9. Архитектура подсетей SMS и взаимодействие SMS с TMN
Отметим ряд особенностей этой архитектуры:
- несколько адресуемых NE могут располагаться в одном месте, доступ к которому осуществляется через шлюзовые элементы сети GNE, например GNEg - GNEo;
- функция MCF имеет возможность завершать, маршрутизировать или обрабатывать сообщения, передаваемые по ЕСС или через внешний О-интерфейс;
- на основе ЕСС можно сформировать звено связи между офисами или местами установки оборудования;
- в пределах одного места установки оборудования можно организовать связь, используя либо встроенные каналы управления ЕСС, либо локальную сеть связи LCN.
Топология SMS и ЕСС.
Каждая SMS должна иметь хотя бы один элемент, соединеный с MD или OS, он называется шлюзовым элементом сети GNE, так как служит шлюзом в подсеть SMS.
На топологию сети ЕСС не накладывается ограничений - это может быть звезда, шина, кольцо или ячеистая сеть.
2.3.2. Функции Управления
2.3.2.1. Общие функции управления
Управление каналами ЕСС. Так как ЕСС используются для связи NE, то каналы ЕСС должны иметь следующие функции:
- запрос/получение сетевых параметров, таких как размер пакета, временные промежутки, качество сервиса и т.д.;
- формирование маршрутизации сообщения между узлами DCC;
- менеджмент сетевых адресов (возможное преобразование форматов адресов);
- запрос/получение сетевого статуса DCC для данного узла;
- возможность разрешать/запрещать доступ к DCC.
Фиксация временных событий. На все события, требующие фиксации во времени ставится временная метка с разрешением в одну секунду. Время фиксируется по показанию локального таймера NE.
Другие функции. Другие общие функции, например, защита на различных уровнях или обеспечение безопасности, дистанционный вход в сеть, загрузка и модификация программного обеспечения, обеспечиваются в настоящее время производителями SDH оборудования.
2.3.2.2. Управление сообщениями об аварийных ситуациях
Наблюдение за сообщениями об аварийных ситуациях. Оно включает обнаружение таких сообщений и фиксацию/сохранение сообщений о тех событиях и условиях, которые сопутствовали их появлению, причем не только в том оборудовании, в котором они были обнаружены. OS SMN должна поддерживать следующие функции:
- автономное сообщение о всех сигналах о возникновении аварийной ситуации;
- запрос на сообщение о всех зарегистрированных сигналах о возникновении аварийной ситуации:
- сообщение о всех таких сигналах;
- разрешение/запрет на автономное сообщение о всех сигналах о возникновении аварийной ситуации;
- сообщение о статусе функции "разрешение/запрет на автономное сообщение о всех подобных сигналах".
Отслеживание истории сигналов/сообщений о возникновении аварийной ситуации. Оно включает запись моментов возникновения таких сигналов и их хранение в регистровом файле, регистры которого содержат все параметры сообщения о возникшей аварийной ситуации. Регистры могут быть считаны по запросу или периодически. OS определяет режим работы регистров: либо запись до заполнения с последующей остановкой или полным стиранием, либо непрерывная запись с циклическим возвратом от конца к началу с перезаписью старых событий.
Другие функции. Из них можно отметить, например, тестирование и регистрацию SDH оборудования.
Основные типы сообщений о возникновении аварийной ситуации. Для того, чтобы получить более полное представление о типах аварийных ситуаций, которые отслеживаются в сети SDH, они представлены в виде таб.2-1, где в левом столбце помещены типы аварийных ситуаций, а в верхней строке - места их возможного возникновения. В ячейках таблицы помещен символ R, если требуется регистрация данного типа аварийной ситуации, или О, если такая регистрация не обязательна.
Таблица 2-1. Основные типы сообщений об аварийных ситуациях, отслеживаемые в сети SDH
|
SPI |
RS |
MS |
Path HOVC |
Path LOVC |
SETS |
||
|
TF |
R |
R |
|||||
|
LOS |
R |
R |
|||||
|
LOF |
R |
R3 |
|||||
|
LOP |
R |
R |
|||||
|
FERF |
R |
R |
R |
||||
|
TIM |
R |
R2 |
|||||
|
SLM |
R |
R |
|||||
|
LOM |
R' |
||||||
|
AIS |
R |
R |
R |
||||
|
0 |
|||||||
|
LTI |
R |
||||||
|
SD |
0 |
|
В таблице использованы следующие сокращения: |
|||
|
TF |
Сбой при передаче |
RS |
Регенераторная секция |
|
LOS |
Потеря сигнала |
MS |
Мультиплексная секция |
|
LOF |
Потеря фрейма |
Path HOVC |
Маршрут VC верхнего уровня |
|
LOP |
Потеря указателя |
Path LOVC |
Маршрут VC нижнего уровня |
|
FERF |
Сбой при приеме на удаленном конце |
PPI/LPA |
Плезиохронный физический интерфейс/ |
|
TIM |
Несовпадение идентификатора трассировки |
адаптпция маршрута VC нижнего уровня |
|
|
SLM |
Несовпадение типа сигнала |
SETS |
Хронирующий источник синхронного |
|
LOM |
Потеря мультифрейма |
оборудования |
|
|
AIS |
Сигнал индикции аварийного состояния |
R' |
Для нагрузки, требующей индикации |
|
Ехс |
Слишком много ошибок |
мультифрейма |
|
|
LTI |
Потеря синхронизации на входе |
R2 |
Если подтверждается использование |
|
SD |
Ухудшение качества сигнала |
байта J2 в VC-11, VC-12 и VC-2 |
|
|
SPI |
Физический интерфейс SDH |
R3 |
Для байт-синхронного отображения |
2.3.2.3. Управление рабочими характеристиками
Сбор данных о рабочих характеристиках системы
Он связан как правило с определением параметров ошибок, описанных в рекомендации ITU-T Rec. G.826. При их определении используются следующие ключевые термины:
- ЕВ - блок с ошибками;
- ES - секунда с ошибками;
- SES - секунда с серьезными ошибками; , - CSES - последовательные секунды с серьезными ошибками. В основном используются следующие параметры ошибок (отнесенные к неискаженному интервалу измерения параметров): коэффициент ошибок по секундам с ошибками ESR, коэффициент ошибок по секундам с серьезными ошибками SESR,коэффициент ошибок по блокам с фоновыми ошибками BBER (здесь под блоками с фоновыми ошибками ВВЕ понимаются те блоки с ошибками, что не вошли в SES).
Отслеживание истории мониторинга рабочих характеристик
Отслеживание истории осуществляется заполнением двух типов регистровых файлов: 24-часовыми файлами и 15-минутными файлами. Текущий 24-часовой регистровый файл по заполнении снабжается текущей датой и перегружается в регистровый файл со вчерашней датой. Шестнадцать 15-минутных регистровых файлов образуют 4-часовую очередь с дисциплиной обслуживания "первый на входе - первый на выходе" FIFO.
Использование временных окон
Общая стратегия их использования описана в рекомендациях ITU-T Rec. М.20, М.2100, М.2120. В нашем случае с помощью OS в NE можно установить либо 15-минутное, либо 24-часовое временное окно. Как только время наступления события совпадает или выходит за границу установленного окна, генерируется уведомление о пересечении (временной) границы или порога TCN.
Генерация отчетов о характеристиках системы
Данные о рабочих характеристиках системы могут быть затребованы OS для анализа, используя интерфейс между OS и NE. Эти данные могут запрашиваться периодически либо сообщаться в момент пересечения границы временного окна.
Мониторинг системы в недоступные интервалы времени '"
В интервалы времени, когда система недоступна, съем данных о характеристиках системы запрещен; однако моменты его начала и конца должны фиксироваться и храниться в регистровом файле из 6 регистров (см. ниже) и иметь возможность считываться OS по крайней мере один раз в день.
Мониторинг дополнительных параметров Дополнительные параметры, такие как:
- секунда, содержащая сигнал OOF (выход за границы фрейма) - OFS,
- число защитных переключений - PSC,
- длительность (определенного) защитного переключения - PSD,
- недоступные секунды - UAS.
Факт выравнивания указателя административного блока - AU PJE, а также CSES могут быть полезны для управления, однако их мониторинг не обязателен. Если он осуществляется, то для накопления предыстории указанных параметров (кроме CSES) используются регистровые файлы с 15-минутными или 24-часовыми временными окнами таким образом, как описано выше. Для параметра AU PJE отдельно должны фиксироваться как положительные, так и отрицательные PJE для одного выбранного AU внутри STM-N.
Событие L /c.5 наступает тогда, когда обнаруживается последовательность из Х или больше SES. При обнаружении этого события последовательность прерывается фиксацией начала недоступного интервала времени, в течение которого CSES не регистрируются. Конец этого интервала фиксируется тогда, когда регистрируется секунда не являющаяся SES. По крайней мере 6 CSES (вместе с датами появления первых SES в последовательности) должны при этом запоминаться. Значение Х устанавливается OS в диапазоне от 2 до 9 в процессе ее конфигурации.
2.3.2.4. Управление конфигурацией
Статус и защитное переключение
Основное назначение защитного (резервного) переключения - подключить резервное устройство вместо основного устройства. Основные функции, дающие возможность осуществить это следующие:
- включение/выключение ручного режима защитного переключения,
- включение/выключение принудительного режима защитного переключения,
- включение/выключение блокировки,
- запрос/установка параметров автоматического защитного переключения - APS.
Другие функции
Другие мероприятия и функции, связанные с управлением конфигурацией, такие как разработка необходимого программно-аппаратного обеспечения и функции его инсталяции, равно как и обеспечение необходимой секретности, относятся к компетенции производителя оборудования.
2.3.3. Протоколы и внутрисистемные взаимодействия
В рамках TMN подсеть SMS является локальной сетью связи LCN. Связь между SMS и OS может осуществляться через одну или более сетей передачи данных DCN и LCN. Это требует организации взаимодействия между SMS и либо DCN, либо LCN, также как и между DCN и LCN. Ниже кратко рассмотрено только взаимодействие между SMS и DCN. Взаимодействие между сетями невозможно без протоколов преобразования формата сообщений на интерфейсных стыках, которыми обмениваются сети, причем будут рассмотрены только протоколы так или иначе связанные с каналами DCC.
2.3.3.1. Обзор используемых протоколов
Для осуществления функций эксплуатации, администрирования, обслуживания и обеспечения ОАМ&Р при передаче сообщений в сетях SDH по каналам передачи данных (DCC) необходимо использовать набор, или стек, протоколов, ориентированный на эталонную модель взаимодействия открытых систем OSI.
Ниже приведен список уровней OSI и соответствующих им протоколов, выбранных для обслуживания встроенных каналов управления (ЕСС) сетей SDH.
Физический уровень - Протокол DCC не оговорен. DCC представляет физический уровень, причем DCC регенераторной секции работает для передачи сообщений как канал 192 кбит/с (байты SOH D1-D3), а DCC мультиплексной секции - как канал 576 кбит/с (байты SOH D4-D12).
Уровень звена данных -Протокол LAPD. Обеспечивает через DCC сети SDH связь (канальный уровень)"точка-точка" между каждой парой смежных сетевых узлов. Используются два типа сервиса: передача информации с подтверждением приема AITS (спецификация этого типа сервиса основана на рекомендации ITU-T Rec. Q.921; используется по умолчанию), передача информации без подтверждения приема UITS (спецификация этого типа сервиса основана на рекомендациях ITU-T Rec. Q.921, Q.922 и ISO 84737).
Сетевой уровень-В соответствии с рекомендацией ITU-T Rec. 0.811 используется протокол ISO 8473. Он обеспечивает дейтаграммный (т.е. не ориентированный на установление предварительного соединения) сервис, удобный для высококачественных высокоскоростных сетей. Этот же стандартопределяет протоколы сведения, используемые для передачи как по ориентированным, так и по не ориентированным на установление соединения подсетям на уровне звена данных, для чего используется функция качества обслуживания QOS. Ее параметры определяются протоколом ISO 8473 и относятся к компетенции сетевого оператора.
Транспортный уровень - Требуемый транспортный протокол - протокол класса 4, обеспечивающий в соответствии с рекомендацией ITU-T Rec. Q.812 надежную доставку по сети и транспорт не ориентированного на установление соединения низлежащего сетевого сервиса (см. стандарт ISO 8073/AD2), осуществляемые на уровне звена данных как через ориентированные, так и через не ориентированные на установление соединения подсети.
Сеансовый уровень - Используется сеансовый протокол, в соответствии с рекомендацией ITU-T Rec. Q.812 обеспечивающий синхронизацию взаимодействующих систем связи при диалоге и управляющий, с учетом требований двух верхних уровней, запросами на транспортные соединения.
Уровень представлений - Используется протокол представлений, в соответствии с рекомендацией ITU-T Rec. Q.812. Этот уровень и нотация абстрактного синтаксиса ASN.1 должны обеспечивать возможность понимания как контекста, так и синтаксиса информации, передаваемой с прикладного уровня на низлежащие уровни.
Прикладной уровень - Используется протокол СМ1Р (см. стандарт ISO 9596). Поддержка протокола передачи файла, доступа и менеджмента FTAM не требуется. В рамках ÑÌ1Ð используются следующие опции:
-сервисный элемент общей управляющей информации CMISE,
-сервисный элемент дистанционных операций ROSE,
- сервисный элемент ассоциированного управления ACSE
2.3.3.2. Внутрисистемные взаимодействия
Каналы DCC регенераторных и мультиплексных секций используют сетевой протокол без установления соединения CLNP,описанный в ISO 8473. Связь в сети DCN между OS и SMS также базируется на основе протоколов OSI. Используется сетевой протокол с установлением соединения CONP технологии Х.25, описанный в стандарте ISO 8208, с протоколом IP в качестве одной из опций в OS.
Согласно модели OSI взаимодействие между подсетями SMS и DCN должно происходить на сетевом уровне, тогда как транспортный и более высокие уровни используются для взаимодействия между конечными системами, например, SNE и OS. Сетевой уровень, в соответствии со стандартом ISO 7498 , должен быть прозрачен для потока данных между конечными системами, т.е. поток данных обрабатывается функциями маршрутизации и ретрансляции сетевого уровня и может зависеть только от качества сетевого сервиса различных подсетей. Взаимодействие подуровней сетевого уровня регламентируется стандартом ISO 8648.
Взаимодействие между SMS и DCN
При передаче сообщений между SMS и DCN происходит взаимодействие между стеками протоколов CLNP (в SMS) и CONP (в DCN). На нижних уровнях OSI взаимодействие основано на стандарте ISO 10172. Стандарт ISO определяет функциональный блок взаимодействия IFU, который и осуществляет функцию ретрансляции и/или преобразование протокольных блоков данных PDU между сетями.
Ретрансляция на сетевом уровне
Блок IFU,функционирующий в режиме ретрансляции на сетевом уровне (NLR), является регулярной промежуточной системой и представляет единственный удовлетворяющий OSI метод взаимодействия между конечными системами, имеющими различные сетевые протоколы. Под взаимодействием понимается функция сетевого уровня, определенная стандартами ISO 7498 и ISO 8648).
Правила функционирования CLNP на сети пакетной коммутации (PSN), определяются функцией сведения, зависящей от подсети (SNDCF), описанной в стандарте ISO 8473.
Режим NLRможет обеспечить взаимодействие между SMN и DCN, если обе сети используют протокол CLNP и соединение типа ТР Class 4 (ТР4). В этом случае сетевой сервис верхнего уровня SMS SNE – DCN OS играет роль сервиса, соответствующего режиму взаимодействия без установления соединения на сети Õ.25, обеспечивающей (через сеть DCN с протоколом CONP) взаимодействие IFU с OS. При этом IFU анализирует адреса назначения сетевых протокольных блоков данных NPDU, полученных от SMN, и транслирует соответствующие CLNP NPDU от SMS на коммутируемые виртуальные цепи SVC сети DCN.
2.4Практические методы управления сетью SDH
2.4.1. Сеть управления на основе каналов DCC
Рассмотрим некоторую обобщенную практическую двухуровневую схему управления сетью SDH, которая состоит, например, из колец SDH, а кольцо состоит из нескольких узлов - мультиплексоров. Соединение колец и узлов формирует SMN. Такое соединение можно сделать, используя либо встроенные каналы связи DCC, которые обеспечиваются самим оборудованием SDH, либо внешнюю кабельную проводку между узлами, реализующую сеть X. 25 или Ethernet. В любом случае каждый узел должен быть доступен для управления. Для защиты наиболее важных участков сети управления может использоваться резервирование.
Маршрутизация в сети управления может осуществляться, например, на основе протокола связи между конечной н промежуточной системами ES-IS или протокола связи между промежуточными системами IS-IS взятых из протоколов, обслуживающих интерфейс Q3. Это обеспечит автоматическую маршрутизацию как в процессе инсталляции сети, так и при
Рис.2-10 Схема управвления сетью SDH
возникновении ошибок в сети, то есть, если какое-то звено сети неисправно, то используется альтернативный маршрут. Схема маршрутизации должна автоматически изменяться и при изменении конфигурации. Обычно используют два-три канала DCC на один узел, чтобы время маршрутизации не было большим, однако при необходимости их число может быть увеличено до семи. На рис.2-10 приведена практическая схема управления сетью SDH, состоящей из двух колец по четыре мультиплексора в каждом, с элемент-менеджером ЕМ (нижний уровень управления), подключенным к одному из узлов сети (мультиплексору) через интерфейс Р, и сетевым менеджером NMS (верхний уровень управления), подключенным через локальную сеть к сети SDH через интерфейс Q3. Это может быть локальный (для данного кольца) или центральный менеджер. Кольца также соединены между собой по контуру управления через интерфейс Q3.
Рассмотренные в этой главе задачи, методы и практические схемы управления сетями SDH выявили ряд характерных моментов. Наиболее важным из них является существование общих черт в управлении сетями передачи данных, использующих различные технологии. Это делает оправданным рассмотрение общей модели управления сетью и общей схемы управления сетью. С этой точки зрения задача управления сетью SDH может рассматриваться как частный случай общей задачи управления. Наиболее важным вкладом здесь является применимость к этой частной задаче управления рассмотренных протоколов, логики внутрисистемных взаимодействий и концепции Менеджер-Агент, а также возможность использования общих интерфейсов Q и F для связи отдельпь.х подсистем в единую схему управления сетью SDH.
Приходится, однако, констатировать, что до сих пор нет единой системы управления сетями SDH, которая, как, например, сетевая ОС Novell Netware для локальных сетей, могла бы после стандартной процедуры настройки управлять сетями SDH, использующими оборудование различных производителей. Более того, даже сам факт построения общей сети SDH, составленной из мультиплексоров различных производителей, хотя бы даже и одного уровня STM-N, пока невозможен.
3. Разработка функциональной схемы контроллера встроенных каналов станции STM-1
3.1 Разработка архитектуры контроллера
Как следует из постановки задачи, контроллер встроенных каналов (в дальнейшем—КВК) должен обеспечивать передачу управляющей информации TMN по трем направлениям (рис.3.1).
Рис. 3.1.
В качестве протокола канального уровня рекомендуется [26] использовать подмножество LAPD протокола HDLC, подробнее этот вопрос освещается ниже. Тогда, с аппаратной точки зрения требуется использовать HDLC-контроллеры. Необходимо 2 блока контроллеров: один для доступа к низкоскоростным каналам D1-D3 (на рис.2, блок обозначен как HDLC1), и другой- для доступа к высокоскоростным каналам D4-D12 (HDLC2). Ко второму же блоку может быть подключен интерфейс Qx. Задачей данных блоков является разбиение данных, предназначенных к передаче, на кадры и собственно передача таких кадров в промежутки времени, зарезервированные в общем потоке передачи под встроенные каналы. Сопряжение HDLC-контроллеров с SDH-шиной предлагается организовать через буферный блок, для обеспечения гибкости системы предлагается наделить этот блок также функцией мультиплексора- для коммутации входящих потоков на любой блок HDLC-контроллеров. Этот блок обозначен на схеме как M. Связь блока с внутренней SDH-шиной и с блоками HDLC-контроллеров показана структурно, причем каждая из многонаправленных линий A,B,C отвечает за свое направление в соответствии с рис. 1 и включает в себя следующие однонаправленные линии (рис.3):
1.
2.
3.
4.
Встроенные каналы передаются и выделяются из последовательной шины 2,048 Мбит/с, к которой и подключен –разрабатываемый конроллер. Структура кадров, передаваемых по внутренней SDH-шине, также показана на рис. 3.3. Каждый кадр состоит из 32 каналов, под каждый канал отведен один байт, частота следования кадров- 8 кГц, таким образом скорость потока по SDH-шине составляет 2,048 Мбит/с. Начало цикла внутренней шины индицируется сигналом-маркером М. Как видно из рис.3, чтобы передавать по низкоскоростному каналу D1-D3 нужно начать передачу сразу же после получения маркера, а чтобы получить доступк высокоскоростному каналу D4-D12, нужно начать передачу с получением 24-ого сиганала побитовой синхронизации.
Рис.3.3.
Сами HDLC-контроллеры не могут организовать передачу в соответствии с протоколом LAPD, и этими контроллерами нужно управлять. Такое управление возможно организовать с помощью какого-либо мощного процессора—например MOTOROLA 360. Этот процессор уже имеет встроенные HDLC-контроллеры и один может управлять доступом в встроенным каналам, но его использование предполагает затраты на разработку дополнительного программного инструметария в связи с тем, что данный процессор в разработках АО “Морион” используется редко. Поэтому гораздо рациональнее будет организовать управление HDLC-контроллерами с помощью процессора DS-520 — продвинутого представителя семейства микроконтроллеров MCS-51 —эта микросхема достаточно часто используется и подробно описана в литературе, организация управления приемопередачей с помощью этой микросхемы—традиционный шаг. Необходимо два таких процессора, для управления доступом к высоко- и низкоскоростным каналам (PU2 и PU3). Для обработки результатов работы КВК, для их визуализации, а прежде всего для управления сложной разветвленной сетью SDH в соответствии с концепцией TMN требуется F-интерфейс для подключения Ws (рис. 3.4).
Рис.3.4
Для взаимодействия 2-х рассматриваемых процессоров с PC по двухточечному соединению предлагается ввести внутреннюю магистраль с третьим процекесором—главным на этой магистрали (PU1). Главный процессор непосредственно связан с PC и перенаправляет получаемые данные по внутренней магистрали подчиненным процессорам. Предлагается внутренняя асинхронная старт-стопная магистраль скоростью 600 кбит/с. Для сопряжения с РС наиболее уместным представляется использовать стандартный интерфейс RS-232. Схему взаимодействия предлагается разработать по принципу “запрос-селекция”. Ведомые процессоры (обозначены на схеме как PU2 и PU3), в случае наличия у них данных для передачи, выставляют на внутреннюю шину SDH-станции запросы, которые поступают в ведущий процессор (PU1). Передача данных не начинается до тех пор, пока ведущий процессор не выставит на внутреннюю шину разрешение, адресованного какому-то из ведомых процессоров. Подробнее этот принцип рассматривается в следующей главе настоящего проекта. Для хранения коммуникационной программы в моменты отключения питания каждому из контроллеров понадобится блок энергонезависимой FLASH-памяти, а для осуществления приемопередачи в соответствии с LAPD-то есть использования алгоритма, хранения/изменения переменных программы—понадобится блок оперативной памяти (RAM). Flash- и Ram-блоков емкостью по 64 килобайта будет вполне достаточно для работы КВК. Адресное пространство всех трех процессоров будет организовано одинаковым образом, поэтому целесообразно для его формирования использовать комбинационную схему,выполненную на ПЛИС-чипсете фирмы ALTERA- это значительно сократит затраты на проектирование схемы в целом.
3.2 Сигналы и линии
Рассмотрим кратко назначение сигналов и линий, показанных на функциональной схеме (подробнее эти сигналы рассматриваются при обсуждении принципиальной схемы):
- AD1 [0..7] - общий сигнал “дата/адрес”. По этой линии могут передаваться как данные, так и первый байт адреса, причем передача адреса сопровождается прямоугольным сигналом ALE (Ardess Lock Enable), что позволяет выделить адрес из общего потока;
- A[8..16] - второй байт адреса;
- PSEN (Program Storage Enable) - сигнал чтения из FLASH-памяти;
- WREN (Write Enable) - сигнал выставляется в том случае, когда идет запись во флэш-память;
- CS (Chip Select) - выбор корпуса- сигнал, указывающий, с каким конкретно кристаллом идет работа в данный момент;
- CSE (Chip Select Enable) - сигнал, вырабатываемый регистром выборки корпуса, находящимся внутри чипсета Альтера- сигнал указывает, что обмен производится с внешним, по отношению к чипсету, блоку (в данном случае- блоком оперативной памяти);
- RD (Read) - чтение памяти;
- WR (Write) - запись в память.
3.3. Разработка функциональной схемы СБИС ПЛ
Как упоминалось выше, адресация блоков ОЗУ и ПЗУ у трех процессоров контроллера организована по одной схеме, поэтому в СБИС ПЛ предлагается организовать три одинаковых логических блока, для обслуживания трех процессоров. Один из таких логических блоков показан на рис.5. Функциональная структура блоков и число входных и выходных сигналов идентичны за одним исключением: для главного процессора PU1 вырабатывается сигнал выбора мультиплексирующей схемы GCSM, а для двух ведомых – сигналы выбора HDLC-контроллеров (соотв. CSH1, MCSH1). Сигналы главного процессора имеют префикс G- – GWR, GRD, и т.д., сигналы первого ведомого процессора на функциональной схеме показаны без префиксов, сигналы второго ведомого процессора обозначены с префиксом M-.
Чтобы уяснить принципы выработки сигналов выбора, необходимо помнить, что процессоримеет ограниченное число служебных линий (RD, WR, ALE, PSEN), и что с помощью этих сигналов нужно организовать адресацию RAM и FLASH памяти, а такжеHDLC-контроллеров.Для этого на СБИС ПЛ предлагается организовать структура с двумя триггерами.
Рис.3.5
Триггере GA предлагается использовать для выделения по сигналу GALE адреса, передаваемого по общей шине адрес-данные (следует помнить, что активный уровень сигнала ALE- нулевой), см. рис 3.6.
Рис.3.6
Генерирование сигналов выбора предлагается организовать в зависимости от состояний второго регистра. Схема работает следующим образом: сначала по шине “адрес-данные” передается “нулевой” адрес (восемь нулей). Он защелкивается в регистре GA. К его выходу подключена схема “и” с инверсными входами, которая откроется этими восемью нулями. Затем по шине “адрес-данные” нужно передать байт данных, два первых бита которого и определят выбираемый кристалл (FLASH, RAM, M). Сигнал записи в регистр GCECONF[0..1] будет выработан при открывании второй “и” на входе GCECONF[0..1] по сигналу GCSP. Двух бит достаточно для кодирования шести состояний, для идентификации выбираемого кристалла достаточно трех (RAM, FLASH, HDLC). Далее, в зависимости от состояния триггера GCECONF, открывается одна из трех “и-не”, которая и определяет внешний кристалл, с которым ведется работа.
Как уже говорилось, для всех микросхем активным уровнем сигнала CS(Chip Select) является нулевой уровень, поэтому сигнал выбора RAM (GCSR), например, будет сгенерированпри открытой “и-не” (в регистр GCECONF записан “0”) по отрицательному фронту сигнала GCSP.
Программма, реализующая на СБИС ПЛ описанную логическую схему, приведена в приложении 1.
|
|
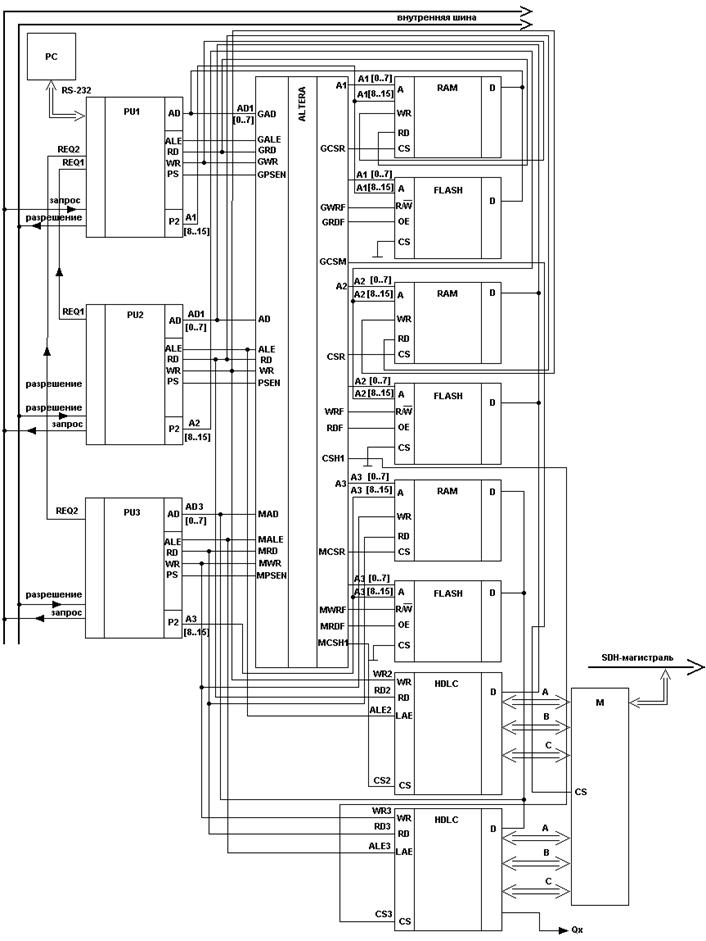
Рис.3.2
4. Разработка принципиальной схемы контроллера
Рассмотрим премлемую аппаратную реализацию функциональных блоков контроллера.
Блоки HDLC-контроллеров предлагается реализовать на стандартных микросхемах SAB 82525 фирмы SIEMENS. Каждая такая микросхема может реализовывать приемопередачу по двум двунаправленным линиям. Для организации доступа к двум каналам с поддержкой приемопередачи по трем независимым направлениям а также для подключения интерфейса Qx, с аппаратной точки зрения понадобится четыре таких микросхемы (D13, D16, D18, D19 на схеме электрической принципиальной).
Три процессора, управляющих передачей в соответствии с протоколом LAPD, как уже упоминалось ранее, аппаратно реализуются на микросхемах DS87C520-QCL фирмы DALLAS SEMICONDUCTOR. Эти процессоры имеют два встроенных последовательных порта, тактируются частотой 24 МГц, питаются постоянным напряжением 5В, могут работать в диапазоне температур 0-70°, могут адресовать 64 кб оперативной памяти и имеют внутренний кэш 256 байт. Для тактирования процессоров предлагается использовать кварцевые резонаторы HC-49/U24.000MHz (B3-B6) вместе с запускающими емкостями, причем в соответствии с рекомендациями фирмы-изготовителя процессоров (DALLAS SEMICONDUCTOR), для успешного запуска внутреннего генератора резонатором емкость каждого конденсатора должна быть выбрана не более 33 пФ. Также следует отметить, что подключаемый ко второму блоку HDLC-контроллеров интерфейс Qx должен иметь внутреннюю синхронизацию, для организации которой необходим еще один кварцевый резонатор (B1) и запускающие емкости C1 C2.Подключение Qx реализовано через буферную схему , которая реализована на микросхеме NM485D фирмы NEWPORT (D4), которая имеет гальваническую развязку- через трансформатор по питанию интерфейса и через оптопару по линии передпчи данных. Блоки FLASH и RAM для трех процессоров предлагается реализовать соответственно на микросхемах AT29C512-70JC фирмы AMTEL (D1, D10, D11) и UM62512V-70L фирмы UMC (D2, D3, D14). Емкость ПЗУ и ОЗУ- по 64 кб на каждую микросхему. Аппаратную реализацию схемы управления выборкой и адресацией, как и говорилось ранее, предлагается осуществить на СБИС ПЛ EPF10K10TC144-4 фирмы ALTERA (D6). Для хранения программы СБИС ПЛ в моменты отключения питания необходим болк постоянной памяти- предлагается реализовать его с помощью конфигурационного ПЗУ EPC1LC20 (D12). В качестве буферно-мультиплексирующего блока предлагается использовать микросхему MT8985AP фирмы Mitel. Так как плата КВК входит в состав станции STM-1, которая питается постоянным напряжением 60В, то рационально организовать питание платы от этого же напряжения, через микросхему TAM25-4811 фирмы TRACO (D22), преобразующую напряжение до +5В. Так как межплатная коммутация электроцепей в блоке станции STM-1 будет осуществляться с помощью кросс-платы, и поэтому для увеличения общей помехозащищенности станции активный уровень сигналов на кросе понижается с +5В до +2В, то для нормальной работы логики необходимо повышать уровень входящих на плату сигналов до +5В и понижать уровень исходящих сигналов до +2В. Для этих целей предлагается использовать буферную микросхему SN74FB1650 фирмы TEXAS INSTRUMENTS (D17).
Для реализации подключения Workstation через стандартный интерфейс RS-232 нужно конвертировать входящие и исходящие сигналы, так как ТТЛ-логика оперирует уровнем 0В и +5В, а RS-232 использует уровни ±12В. Для преобразования сигналов предагается использоватьбуферную микросхему MAX3223CAP фирмы MAXIM (D23), причем для получения отрицательного напряжения (а микросхема питается +5В) в соответствии с типовой схемой включения используются накачивающие емкости, параметры которых выбираются в соответствии с рекомендациями изготовителя.
Подключение к внутренней шине с целью увеличения помехозащищенности осуществдляется с помощью стандартного интерфейса RS-485, имеющего дифференциальный выход. Интерфейс реализован на микросхеме MAX491ECSA фирмы MAXIM(D9). Для организации обмена КВК по внутренней шине с другими устройствами STM-станции предлагается схему географического адреса; для этого предлагается использовать пик-контроллер на базе микросхемы PIC16C72-20/SO фирмы MICROCHIP (D21), который будет сравнивать адресное поле в передаваемых по внутренней шине информационных пакетах фиксированной длины со своим географическим адресом в системе устройств STM-станции, и , таким образом, будет отбирать пакеты, предназначенные КВК.
5.Обзор используемых протоколов
5.1. HDLC
HDLC (высокоуровневое управление каналом передачи данных) является стандартом, опубликованным МОС (Международная организация по стандартизации), который получил во всем мире широкое распространение. Стандарт обеспечивает многие функции и охватывает большой диапазон применений. Он рассматривается в качестве базового множества для нескольких других протоколов. Он удовлетворяет определению протокола непрерывного ARQ (скользящее окно). Настоящая глава посвящена обсуждению многих функций базового множества (superset) HDLC. В ней рассматриваются также используемое подмножество этого протокола—LAPD
5.1.1.Необязательные возможности HDLC
Для реализации протокола HDLC предусмотрен ряд необязательных возможностей. Он поддерживает полудуплекснуюи полнодуплексную передачу, одноточечную и многоточечную конфигурации, а также коммутируемые и некоммутируемые каналы. Существует три типа станций HDLC:
• Первичная станция управляет звеном передачи данных (каналом). Эта станция передает кадры команд вторичным станциям, подключенным к каналу. В свою очередь она получает кадры ответа от этих станции. Если канал является многоточечным, главная станция отвечает за поддержку с каждой станцией, подключенной к каналу, отдельного сеанса связи.
• Вторичная станция работает как зависимая по отношению к первичной станции. Она реагирует на команды, получаемые от первичной станции, в виде ответов. Она поддерживает только один сеанс, а именно с первичной станцией. Вторичная станция не отвечает за управление каналом.
• Комбинированная станция передает как команды, так и ответы и получает команды и ответы от другой комбинированной станции, с которой поддерживает сеанс.
Существуют три логических состояния, в которых могут находиться станции в процессе взаимодействия друг с другом.
• Состояние логического разъединения (LDS). В этом состоянии станция не может вести передачу или принимать информацию. Если вторичная станция находится в нормальном режиме разъединения, она может принять кадр только после получения явного разрешения на это от первичной станции. Если станция работает в асинхронном режиме разъединения, вторичная станция может инициировать передачу без получения на это явного разрешения, но кадр должен быть единственным кадром, который указывает статус вторичной станции.
• Состояние инициализации (IS) определяется каждой фирмой и выходит за рамки стандартов HDLC.
• Состояние передачи информации (ITS). В этом состоянии вторичной, первичной и комбинированным станциям разрешается вести передачу и принимать информацию пользователя.
Когда станции находятся в состоянии передачи информации, они могут взаимодействовать друг с другом в одном из трех режимов работы. Во время сеанса эти режимы могут устанавливаться и отменяться в любой момент, тем самым обеспечивается значительная гибкость во взаимодействии станций.
• Режим нормального ответа (NRM) требует, чтобы прежде, чем начать передачу, вторичная станция получила явное разрешение от первичной. После получения разрешения вторичная станция начинает передачу ответа, который может содержать данные. Пока канал используется вторичной станцией, может передаваться один или более кадров. После передачи последнего кадра вторичная станция должна снова ждать явного разрешения, прежде чем снова начать передачу.
• Режим асинхронного ответа (ARM) позволяет вторичной станции инициировать передачу без получения явного разрешения от первичной станции (обычно, когда канал свободен,—в состоянии покоя). Могут передаваться один или несколько кадров данных или управляющая информация, отражающая изменение статуса вторичной станции. ARM может уменьшить накладные расходы, поскольку вторичная станция, чтобы передать данные, не нуждается в последовательности опроса.
• Асинхронный сбалансированный режим (АВМ) использует комбинированные станции. Комбинированная станция может инициировать передачу без получения предварительного разрешения от другой комбинированной станции.
До сих пор в нашем обсуждении мы имели дело с тремя типами станций в HDLC, функционирование которых определяется тремя логическими состояниями, причем в состоянии передачи информации станции могут работать в одном из трех режимов. Кроме того, в HDLC предусмотрены следующие способы конфигурирования канала при его использовании первичной, вторичной или комбинированной станцией:
• несбалансированная конфигурация (в литературе часто обозначается как UN) обеспечивает работу одной главной станции с одной или большего числа подчиненных станций в конфигурации двухточечной или многоточечной, полудуплексной или полнодуплексной, с коммутируемым каналом или некоммутируемым. Конфигурация называется несбалансированной потому, что первичная станция отвечает за управление каждой вторичной станцией и за выполнение команд установления режима.
• сбалансированная конфигурация (BA) состоит из двух комбинированных станций только в двухточечном соединении, метод передачи — полудуплексный или дуплексный, канал — коммутируемый или некоммутируемый. Комбинированные станции имеют равный статус в канале и могут несанкционированно посылать друг другу трафик. Каждая станция несет одинаковую ответственность за управление каналом.
5.1.2.Формат кадра HDLC
В протоколе HDLC используется термин кадр для обозначения независимого объекта данных, передаваемого по каналу от одной станции к другой. Кадры могут быть трех типов:
• Кадр информационного формата используется для передачи данных конечных пользователей между двумя устройствами.
• Кадр супервизорного формата выполняет управляющие функции, такие, как подтверждение (квитирование) кадров, запрос на повторную передачу кадров и запрос на временную задержку передачи кадров. Фактическое использование супервизорного кадра зависит от режима работы звена (режим нормального ответа, асинхронный сбалансированный режим, асинхронный режим ответа).
• Кадр ненумерованного формата также используется для целей управления. Кадр используется для инициализации или разъединения звена, а также других функций управления звеном.
Кадр содержит пять двоичных разрядов, что позволяет определить до 32 команд и 32 ответов. Конкретный тип команды и ответа зависит от класса процедуры HDLC. (Команды и ответы будут рассмотрены вкратце.)Кадр состоит из пяти или шести полей. Все кадры должны начинаться и заканчиваться полями флага. Необходимо, чтобы станции, подключенные к звену данных, постоянноконтролировали двоичную последовательность флага. Последовательность флага состоит из 01111110. Флаги могут постоянно передаваться по каналу между кадрами HDLC. Для индикации исключительной ситуации в канале могут быть посланы семь подряд идущих единиц. Пятнадцать или большее число единиц поддерживают канал в состоянии покоя. Если принимающая станция обнаружит последовательность битов, не являющихсяфлагом, она тем самым уведомляется о начале кадра, об исключительной (с аварийным завершением) ситуации или ситуации покоя канала. При обнаружении следующей флаговой последовательности станция будет знать, что поступил полный кадр.
Адресное поле определяет первичную или вторичную станции, участвующие в передаче конкретного кадра. Каждой станции присваивается уникальный адрес. В несбалансированной системе адресные поля в командах и ответах содержат адрес вторичной станции. В сбалансированных конфигурациях командный кадр содержит адрес получателя, а кадр ответа содержит адрес передающей станции (см. рис. 4.3, б).
Управляющее поле содержит команду и ответы, а также порядковые номера, используемые для отчетности о прохождении данных в канале между первичной и вторичной станциями. Формат и содержание управляющего поля могут варьироваться в зависимости от использования кадра HDLC. Мы вкратце рассмотрим реальное содержание управляющего поля.
Информационное поле содержит действительные данные пользователя. Информационное поле имеется только в кадре информационного формата. Его нет в кадре супервизорного или ненумерованного формата.
Поле контрольной последовательности кадра (КПК) используется для обнаружения ошибок передачи между двумя станциями звена данных. Передающая станция осуществляет вычисления над потоком данных пользователя, и результат этого вычисления включается в кадр в качестве поля КПК. В свою очередь, принимающая станция производит аналогичные вычисления и сравнивает полученный результат с полем КПК. Если имеет место совпадение, велика вероятность того, что передача произошла без ошибок. В случае несовпадения, возможно, имела место ошибка передачи, и принимающая станция посылает NAK” означающий, что необходимо повторить передачу кадра. Вычисление КПК называется циклическим контролем по избыточности и использует производящий полином Х^Х^+ХЧ-! в соответствии с рекомендацией МККТТ V.41.
5.1.3.Кодонезависимость и синхронизация HDLC
HDLC является кодопрозрачным протоколом. Он не зависит от конкретного кода (ASCII/IA5 или EBCDIC) при выполнении функций управления каналом. Кроме того, двоичные комбинации управляющих полей обычно занимают в кадре фиксированные разряды. Восьмибитовая комбинация флага помещается в начале и конце кадра, чтобы дать возможность приемнику распознать начало и конец кадра. Кроме уникальной флаговой последовательности 01111110 протоколом HDLC используются два других сигнала. Сигнал аварийного завершения (A3) состоит из последовательности единиц, число которых не меньше семи и не больше четырнадцати; состояние покоя представляется последовательностью пятнадцати или большего числа единиц. Сигнал аварийного завершения (abort) помещается в конце кадра. Передающая станция посылает этот сигнал, когда возникает исключительная ситуация, требующая восстановления. Вслед за сообщением об аварийном завершении могут посылаться флаги для того, чтобы поддерживать канал в активном состоянии, и передача могла продолжаться. Сигнал покоя означает, что канал находится в состоянии покоя.
Одно из применений состояние покоя находит в полудуплексном сеансе, когда при обнаружении сигнала покоя производится изменение направления передачи на противоположное. Фактическое время между передачами кадров по каналу называется межкадровым временным заполнением. Это временное заполнение сопровождается передачей между кадрами непрерывной последовательности флагов. Флаги могут быть восьмибитовыми комбинациями, или же может иметь место совмещение последнего 0 предыдущего флага с первым 0 следующего флага.
В этом месте имеет смысл задать такой вопрос. Очевидно, возможны случаи, когда прикладной процесс помещает в поток данных пользователя последовательность 01111110, совпадающую с флагом. Что происходит при этом? Эта ситуация может произойти и действительно происходит. Для того чтобы предотвратить вставку в поток данных пользователя флаговой комбинации, передающая станция помещает 0 после пяти подряд идущих единиц, встретившихся в любом месте между начальным и конечным флагами кадра. Разумеется, такая вставка 0 производится в адресное, управляющее, информационное поля и поле КПК. Этот метод называется вставкой битов (bit stuffing). После того как завершается вставка битов в кадр, и по концам кадра помещаются флаги, кадр передается приемнику по каналу.
Приемник постоянно контролирует поток битов. После того как он получит нуль с пятью далее идущими подряд единицами, приемник анализирует следующий бит. Если это нуль, он удаляет этот бит. Однако, если седьмой бит является единицей, приемник анализирует восьмой бит. Если это нуль, он считает, что получена флаговая последовательность 01111110. Если это единица, он знает, что получен сигнал покоя или аварийного завершения, и выполняет соответствующие действия. Таким образом, впротоколе HDLC обеспечиваются кодовая прозрачность и прозрачность по данным. Протоколу безразлично, какие кодовые комбинации находятся в потоке данных. Единственное, что требуется, — это поддерживать уникальность флагов.
5.1.4.Управляющее поле HDLC
Давайте вернемся к более подробному рассмотрению управляющего поля, так как это поле определяет, каким образом протокол управляет процессом передачи данных (см. рис. 4.3).
Рис. 5.1а Формат кадра HDLC.
Рис. 5.1б Правила адресации.
Это управляющее поле определяет функцию кадра и поэтому требует реализации определенного алгоритма управления движением графика между принимающей и передающей станциями. Напомним, что это поле может быть одного из трех типов формата (ненумерованный, супервизорный и информационный). Управляющее поле определяет команды и ответы, используемые для управления потоком трафика в канале.
Действительный формат управляющего поля (информационный, супервизорный или ненумерованный) определяет то, как это поле кодируется или используется. Самым простым форматом является информационный формат. Содержимое управляющего поля для этого формата показано на рис. 4.3. Управляющее поле информационного кадра содержит два порядковых номера. Номер N(Пос) (Порядковый номер посылки) связан с порядковым номером передаваемого кадра. N(Пр) (Порядковый номер приема) означает порядковый номер следующего кадра, который ожидается принимающей станцией. N(Пр) выступает в качестве подтверждения предыдущих кадров. Например, если поле N(Пр) установлено в 4, станция, получив N(Пр)=4, знает, что передача кадров 0,1,2и 3завершилась успешно и что станция, с которой производится обмен данными, ожидает, что следующий кадр будет иметь порядковый номер посылки N(Пос)=4. Поле N(Пр) обеспечивает включающее подтверждение (квитирование), то есть N(Пр)=4 включает подтверждение не только одного предшествующего сообщения. Понятия переменных состояния посылки N(Пос) и состояния приема N(Пр), введенные в гл. 2, используются в полях N(Пос) и N(Пр) протокола HDLC. HDLC использует также протоколы автоматического запроса на повторение. Непрерывный ARQ (скользящее окно), рассмотренные в гл. 2.
Пятый двоичный разряд, бит P/F или бит опроса/окончания принимается во внимание только тогда, когда он установлен в 1. Он используется первичной и вторичной станциями для выполнения следующих функций:
• Первичная станция использует бит Р для санкционирования передачи кадра статуса от вторичной станции. Р также может означать опрос.
• Вторичная станция отвечает на бит Р кадром данных или состояния, а также битом F. Бит F может также означать окончание передачи вторичной станцией в нормальном режиме ответа (NRM).
Бит P/F называется битом Р, когда он используется первичной станцией, и битом F, когда он используется вторичной станцией. Только один бит Р (ожидающий ответа в виде F бита) может быть активным в канале в любой момент времени. Если некоторый бит Р установлен в 1, он может быть использован в качестве контрольной точки. То есть Р=1 как бы говорит:“Ответьте мне, потому что я хочу знать ваш статус”. Контрольные точки играют большую роль в различных автоматизированных процессах. Это машинный способ устранить неопределенность и отменить накопленные транзакции.
Бит P/F может использоваться и интерпретироваться следующим образом:
1. В режиме NRM вторичная станция не может вести передачу, пока не будет получена команда с установленным в 1 битом Р. Первичная станция может запросить информационные (I) кадры путем посылки кадра с установленным в 1 битом Р или путем посылки некоторых супервизорных (S) кадров (RR, REJ или SREJ) с установленным в 1 битом Р.
2. В режимах ARM и АВМ информационные кадры могут передаваться без запроса с помощью команды, имеющей единичный бит Р. Установленный в 1 бит Р может использоваться для запроса ответа с установленным в 1 битом F так быстро, насколько это возможно.
3. В режимах ARM и АВМ производится передача кадра с установленным в 1 битом F вслед за приемом команды с установленным в 1 битом Р.
• В случае двунаправленной одновременной (полнодуплексной) передачи, когда по получении команды с установленным в 1 битом Р передачу ведет вторичная станция, бит F устанавливается в 1 в самом первом очередном ответе.
• Передача кадра с установленным в 1 битом F не требует, чтобы вторичная станция прекратила передачу. Вслед за кадром с установленным в 1 битом F могут быть еще переданы кадры. В режимах ARM и АВМ не следует интерпретировать бит F как окончание передачи вторичной станцией; его следует просто считать индикатором ответа на предыдущий кадр.
5.1.5.Команды и ответы
Супервизорный формат, показанный на рис. 4.3, предусматривает четыре команды и ответа, которые представлены на рис. 4.5. (Обобщенная сводка всех команд и ответов дана в таблице 4.2.) Этими командами и ответами являются: Готов к приему (Receive Ready—RR), Неприем (Reject—REJ), He готов к приему (Receive Not Ready —RNR), Выборочный неприем (Selective Reject—SREJ). Назначение этого формата и четырех команд и ответов состоит в выполнении нумерованных (т. е. использующих порядковые номера кадров) супервизорных функций, таких, как подтверждение (квитирование), опрос, временная задержка передачи данных и восстановление после ошибок. Кадры супервизорного формата не содержат информационного поля, следовательно, как показано на рис. 4.3, в них располагается порядковый номер приема. Супервизорный формат может быть использован для подтверждения приема кадров от передающей станции. Рассмотрим команды и ответы, используемые супервизорным форматом.
Готов к приему (RR) используется первичной или вторичной станцией для индикации того, что станция готова принять информационный кадр и/или подтвердить (квитировать) ранее принятые кадры с помощью поля N(Пр). Если станция до этого, используя команду Не готов к приему, посылала уведомление о том, что она занята, теперь она использует команду Готов к приему для индикации того, что она свободна и готова принять данные. Первичная станция может также использовать команду Готов к приему для опроса вторичной станции.
Не готов к приему (RNR) используется станцией для индикации состояния занятости. Эта команда уведомляет передающую станцию о том, что принимающая станция не способна принять дополнительные поступающие данные. Кадр RNR, используя поле N(Пр), может подтвердить прием ранее переданных кадров. Состояние занятости может быть сброшено посылкой кадра RR, а также некоторых других кадров, которые будут рассмотрены позднее.
Выборочный неприем (SREJ) используется станцией для запроса повторной передачи единственного кадра, который определен в поле N(Пр). Как и в случае включающего подтверждения, подтверждение распространяется на все информационные кадры с номерами до N(Пр) — 1 включительно. Выборочный неприем позволяет реализовать режим выборочного повторения, рассмотренный в гл. 2. Как только передан кадр SREJ, следующие кадры принимаются и сохраняются для повторно передаваемого кадра.
Неприем (REJ) используется для запроса передачи кадров, начиная с кадра, указанного в поле N(Пр). Подтверждаются все кадры с номерами до N(Пр) — 1. Кадр REJ может использоваться для реализации рассмотренного в гл. 2 метода Возвращение-на-N (Go-Back-N).
Третий и последний тип формата в протоколе HDLC предназначен для реализации ненумерованных команд и ответов. Этот формат используется для посылки большинства индикаторов команд и ответов. Структура управляющего поля ненумерованного формата показана на рис. 4.3. Ненумерованные команды можно разбить на группы в соответствии с выполняемыми функциями:
- команды установки режима: SNRM, SARM, SABM, SNRME, SARME, SABME, SIM, DISC (SNRME, SARME, SABME для расширенной адресации);
- команды передачи информации: UI, UP;
- команды восстановления: RESET;
- другие команды: XID, TEST.
Рассмотрим команды/ответы для ненумерованного формата:
UI (Unnumbered Information—Ненумерованная информация). Эта команда позволяет производить передачу данных пользователя в ненумерованном кадре (т. е. без порядкового номера).
RIM (Request Initialization. Mode — Режим инициализации запроса). Кадр RIM является запросом на команду SIM от вторичной к первичной станции.
SIM (Set Initialization Mode—Установить режим инициализации). Эта команда используется для инициализации сеанса между первичной и вторичной станциями. Ожидаемым ответом является UA.
SNRM (Set Normal Response Mode—Установить режим нормального ответа). Эта команда переводит вторичную станцию в NRM (режим нормального ответа). NRM предотвращает посылку вторичной станцией несанкционированных (unsolicited) кадров. Это означает, что первичная станция управляет всем потоком сообщений в канале.
DM (Disconnect Mode—Режим разъединения). Этот кадр передается вторичной станцией для индикации того, что она находится в режиме логического разъединения.
DISC (Disconnect—Разъединить). Эта команда, передаваемая первичной станцией, переводит вторичную станцию в режим разъединения аналогично нажатию рычага телефонного аппарата.
UA (Unnumbered Acknowledgment—Ненумерованное подтверждение). Это—подтверждение АСК для установки режима команд (SIM, DISC, RESET). UA также используется для уведомления об окончании состояния занятости станции.
FRMR (Frame Reject—Неприем кадра). Вторичная станция посылает этот кадр, когда она встречается с недействительным кадром. Это делается не в случае обнаружения ошибки, указываемой в поле контрольной последовательности, а в более необычных ситуациях. Причина указывается в информационном поле.
Кадр ответа FRMR используется при выполнении следующих условий:
1.Прием недействительного управляющего поля команды пли ответа.
2.Прием слишком длинного информационного поля.
3.Прием недействительного поля N (Пр).
4.Приемнедопустимого информационного поля или супервизорного/ненумерованного кадра неправильной длины.
Протокол HDLC с помощью кадра FRMR обеспечивает значительный объем информации о состоянии (status). Информационное поле содержит следующее:
- управляющее поле отвергнутого кадра;
- текущее значение переменных состояния принимающей станции - посылки N(Пос) и приема N(Пр);
- отвергнутый кадр был командой или ответом;
- управляющее поле является недействительным;
- кадр был передан с недопустимым информационным полем;
- информационное поле является слишком длинным;
- порядковые номера являются недействительными.
RD (Request Disconnect — Запрос разъединения). Это запрос от вторичной станции на логическое разъединение и установление состояния логического разъединения.
XID (Exchange State Identification—Идентификация станции при коммутации). Эта команда запрашивает идентификацию вторичной станции. В системах с коммутацией эта команда используется для идентификации вызывающей станции.
UP (Unnumbered Polls—Ненумерованные опросы). (Этот кадр будет объяснен позже, при рассмотрении шлейфовых конфигураций.)
TEST (Test—Проверка). Этот кадр используется для санкционирования тестовых ответов от вторичной станции.
SARM (Set Asynchronous Response Mode — Установить режим асинхронных ответов). Устанавливает режим, позволяющий вторичной станции вести передачу без опроса со стороны первичной станции. Он переводит вторичную станцию в состояние передачи информации (IS) режима ARM. Поскольку команда SARM устанавливает две несбалансированные станции, SARM должна выдаваться по обоим направлениям передачи:
Станция А посылает: В, DISC
Станция В посылает: В, UA A, DISC
Станция А посылает: А, UA
Станция В посылает: А, SARM
Станция А посылает: А, UA В, SARM
Станция В посылает: В, UA
Команды DISC посылаются, чтобы гарантировать полную реинициализацию канала.
SABM (Set Asynchronous Balanced Mode—Установить асинхронный сбалансированный режим). Устанавливает режим в ARM, в котором станции являются равноправными. Для передачи не требуется опроса, поскольку каждая станция является станцией комбинированного типа.
SNRME (Set Normal Response Mode Extended—Установить расширенный режим нормального ответа). Устанавливает SNRM с двумя дополнительными байтами в управляющем поле.
SABME (Set Asynchronous Balanced Mode Extended—Установить расширенный асинхронный сбалансированный режим). Устанавливает SABM с двумя дополнительными байтами в управляющем поле.
UP (Unnumbered Poll—Ненумерованный опрос). Команда опрашивает станцию безотносительно к нумерации кадров и квитированию. Если бит опроса установлен в 0, ответ является необязательной возможностью, предоставляемой только для одного ответа.
RSET (Reset—Сброс переменных). Передающая станция сбрасывает свой N(Пос), а принимающая станция свой N(Пр). Эта команда используется для восстановления. Кадры, которые ранее не были квитированы, остаются таковыми.
HDLC, кроме того, использует тайм-аут (таймер Т1), который начинается с момента передачи каждого кадра. Т1 используется для инициирования повторной передачи, когда таймер переполняется. Кроме того, используется счетчик N2 для определения максимального числа повторных передач, которые будут выполнены до того, как переполнится таймер Т1. Переменные Т1 и N2 используются также командами/ответами установления звена, такими, как SABM и UA.
5.1.6. Процесс передачи в протоколе HDLC
Мы рассмотрели в данном разделе много терминов и понятий. Попробуем теперь свести воедино этот материал на реальных примерах процесса обмена данными. На рис. 5.2—5.6 показаны различные виды коммуникации:
- асинхронный сбалансированный режим с полудуплексным потоком данных (рис. 5.2);
- асинхронный сбалансированный режим с полнодуплексным потоком данных (рис. 5.3);
- восстановление после ошибок (исправление ошибок) по методу Возвращение-на-N (Go-Back-N) (контрольная точка) (рис. 5.4);
- восстановление после ошибок по методу Возвращение-на-N (отвергнуть) (рис. 5.5);
- восстановление после ошибок по методуВыборочного неприема (Selective Reject) (рис. 5.5);
Прежде всего, взяв за основу рис. 5.2, рассмотрим условные обозначения, используемые на рисунках. Рисунки представляют собой как бы “логические” снимки, сделанные в отдельные интервалы времени (n, n+1 и т. д.). Обозначения, находящиеся во временном “окне”, отражают содержание кадра HDLC (или некоторого подмножества протокола, например SDLC), передаваемого станциями A и B в конкретное время.
Весьма маловероятно, что две станции начнут передачу строго в один и тот же момент времени, но для упрощения объяснения мы будем придерживаться этого предположения. Например, временное окно станции A могло бы быть изображено более широким, чем окно станции B, что означало бы, что станцией A передается более длинный кадр, но неравные окна неоправданно усложнили бы и без того сложную тему. Если читатель согласится с этой небольшой аномалией, принципы, которые поясняются на рисунках, остаются в силе. Кроме того, иллюстрации полнодуплексного метода показывают некоторые временные окна, относящиеся к каналу, который находится в состоянии покоя. Это может иметь место или нет в зависимости от того, как загружены станции.
|
n |
n+1 |
n+2 |
n+3 |
n+4 |
n+5 |
n+6 |
n+7 |
n+8 |
|
|
Станция А Передает |
B,Sabm,P |
B, I, S=0, R=0 |
B, I, P, S=1, R=0 |
A, RR, P, R=2 |
- |
||||
|
Станция B передает |
B, UA, F |
B, RR, F, R=2 |
A, I,S=0, R=2 |
A, I, P, S=1, R=2 |
B, RR, F, R=2 |
Рис. 5.2. Асинхронный сбалансированный режим с полудуплексным потоком данных (с использованием P/F для реализации “контрольной точки”).
|
n |
n+1 |
n+2 |
n+3 |
n+4 |
n+5 |
n+6 |
n+7 |
n+8 |
|
|
Станция А Передает |
B,I, S=0, R=0 |
B,I, P,S=1 R=1 |
B,I, S=2, R=3 |
B, RR, P, R=4 |
B,I, S=3, R=5 |
B,RR, P,R=6 |
|||
|
Станция B передает |
A,I, S=0, R=0 |
A, I, S=1, R=1 |
B, RR, F, R=2 |
A, I, S=2, R=2 |
A,I, S=3, R=2 |
A,I,S=4, R=3 |
B,RR, F,R=3 |
A,I,S=5, R=3 |
A,RR, P,R=4 |
Рис. 5.3. Асинхронный сбалансированный режим с полудуплексным потоком данных (P не останавливает потока данных). Предполагается, что в предыдущих кадрах был установлен асинхронный сбалансированный режим.
|
n |
n+1 |
n+2 |
n+3 |
n+4 |
n+5 |
n+6 |
n+7 |
n+8 |
|
|
Станция А Передает |
B,I, S=6, R=4 |
B,I, S=7, R=4 (Ошибка) |
B,I, S=0, R=4 |
B, I, P,S=1 R=4 |
B,I, S=7, R=4 |
B,I, S=0, R=4 |
B,I, S=1, R=4 |
||
|
Станция B передает |
B,RR, F,R=7 |
RR,F, R=2 |
Рис 5.4. Восстановление по методу “возвращение-на-N” (контрольная точка. Рисунок иллюстрирует продолжающийся сеанс; P и F используются для еализации восстановления.
|
N |
n +1 |
n+2 |
n+3 |
n+4 |
n+5 |
n+6 |
|
|
Станция А Передает |
B,I, S=6, R=4 |
B,I, S=7, R=4 (Ошибка) |
B,I, S=0, R=4 |
B,I,S=7 R=4 |
B,I, S=0, R=4 |
B,I,P S=1, R=4 |
|
|
Станция B передает |
B, REJ, F, R=7 |
B,RR, F,R=2 |
Рис 5.5. Исправление ошибок с использованием метода “возвращение-на-N” (REJ). Рисунок иллюстрирует продолжающийся сеанс.
|
N |
n +1 |
n+2 |
n+3 |
n+4 |
n+5 |
|
|
Станция А Передает |
B,I, S=6, R=4 |
B,I, S=7, R=4 (Ошибка) |
B,I, S=0, R=4 |
B,I,S=7 R=4 |
B,I,P S=1, R=4 |
|
|
Станция B передает |
B, SREJ, F, R=7 |
B,RR, F,R=2 |
Рис 5.6. Исправление ошибок по методу “выборочный неприем”. Рисунок иллюстрирует продолжающийся сеанс.
Смысл обозначений такой:
А, В - Адрес станции в заголовке кадра.
I — Информационный кадр.
S=x - Порядковый номер посылки x.
R=x — Порядковый номер приема х.
RR, SNRM, SABM, REJ, SREJ — Команды и ответы.
P/F - Бит опроса/окончания установлен в 1.
Напомним, что порядковый номер приема означает включающее подтверждение всего переданного и принятого трафика. Номер в этом поле в действительности представляет собой величину, на 1 большую номера последнего подтвержденного кадра. Например, R==4 означает, что подтверждены кадры 0, 1, 2 и 3 и что приемник ожидает, что следующий кадр будет иметь 4 в поле порядкового номера посылки передающей станции. По ходу описания процесса мы будем обсуждать бит P/F там, где это необходимо.
Все рисунки сопровождаются кратким описанием событий в каждый период времени. Нетрудно заметить, что в иллюстрациях в качестве адреса станции используется либо А, либо В. Как отмечалось ранее, правилами протокола HDLC определено, какой адрес (передающей или принимающей станции) помещается в поле адреса: команды используют адрес принимающего одноуровневого логического объекта уровня звена данных, а ответы используют адрес передающего объекта уровня звена данных. Таким образом, в случае станции с адресом А, если принятый кадр содержит А, это команда; если принятый кадр содержит В, это ответ. (См. рис. 5.1, б, на котором представлены эти правила.)
Ниже перечислены моменты времени и события для процесса, представленного на рис. 5.2:
n Станция А передает команду Установить асинхронный сбалансированный режим (SABM) с установленным битом Р.
n+1 Станция B отвечает ненумерованным подтверждением (UA) c установленным битом F.
n+2,3 Станция А посылает информационные кадры 0 и 1, устанавливает бит Р.
n+4, 5, 6 Станция В подтверждает передачу станции А, посылая 2 в поле порядкового номера приема. Станция В, кроме того, передает информационные кадры 0 и 1.
n+7 Станция А подтверждает кадры 0 и 1 станции В, порядковый номер 2 в поле приема.
n+8 Станция В также подтверждает последний переданный А кадр с номером 2 и объявляет, что ему нечего передавать. Отметим, что поле приема станции В сохраняло значение 2.
Ниже приведены моменты времени и события для процесса, представленного на рис. 5.3:
n Обе станции, А и В, передают информационный кадр с порядковым номером посылки 0.
n+1 Станции А и В посылают подтверждения приема кадров с номером 0, используя порядковые номера приема, равные 1. Они также передают информационные кадры с порядковыми номерами посылки, равными 1. Станция А посылает разрешение на ответ (response solicitation), устанавливая в 1 бит Р.
n+2,3 Станция В выдает команду Готов к. приему (RR), чтобы подтвердить кадр с номером 1 станции А, используя порядковый номер приема 2. Она также устанавливает свой бит в ответ на предыдущий бит Р, но в режиме АВМ может продолжать передачу. Станция В передает также информационный кадр 2.
n+4 Станция А посылает информационный кадр 2 и подтверждает кадры 1 и 2 станции В, используя порядковый номер приема 3. Станция В посылает информационный кадр 3.
n+5 Станции А посылать нечего, но она подтверждает кадр с номером 3 станции В, используя порядковый номер приема 4. Станция В подтверждает кадр с номером 2 станции А, используя порядковый номер приема 3, и передает кадр 4. Станция А разрешает посылку ответа, устанавливая в 1 бит Р.
n+6 Станция В отвечает на предыдущий бит Р установкой бита F в 1.
n+7 Станция А передает кадр 3 и подтверждает кадр 4 станции В, используя порядковый номер приема 5. Станция В передает информационный кадр 5.
n+8 Ни у одной станции нет данных для передачи. Станция А посылает Готов к приему (RR), чтобы индицировать прием кадра 5. Станция В подтверждает кадр 3 станции А, используя порядковый номер приема 4.
Рис. 5.4, 5.5 и 5.6 являются примерами того, как в протоколе HDLC обрабатываются ошибки передачи. На рис. 5.4 показано использование поля порядкового номера приема для отрицательного подтверждения (NAK) кадра (что, как мы увидим, может представить определенные проблемы).На рис. 5.5 показано использование Неприема (REJ), а рис. 5.6 иллюстрирует использование Выборочного неприема (SREJ). Здесь рассматривается момент п продолжающегося сеанса,когда станция А передает кадр с номером 6.
Ниже приведены моменты времени и события для процесса, показанного на рис. 5.4:
n, n+1,2,3 Станция А посылает информационные кадры 6,7,0 и 1. Отметим, что, поскольку 7 является наибольшим допустимым порядковым номером, после 7 следует 0. Во время этого периода станция В обнаруживает ошибку в кадре 7. В n+3 станция А посылает бит опроса, который производит такое же действие, как и контрольная точка, т. е. разрешает ответ от станции В.
n+4 Станция В возвращается в Готов к приему (RR) с номером посылки 7 и битом окончания F. Это означает, что станция В снова ожидает приема кадра 7 (и всех кадров, переданных после 7).
n+5, 6, 7 Станция А повторно передает кадры 7, 0 и 1 и устанавливает бит Р в качестве контрольной точки.
n+8 Станция В подтверждает кадры 7,0 и 1 командой Готов к. приему (RR) и порядковым номером приема 2. а также устанавливает бит F.
Исключительное использование поля порядкового номера приема N(Пр) для отрицательного подтверждения кадра не рекомендуется для полнодуплексной передачи. Так как кадры передаются по каналу в обоих направлениях, порядковые номера посылки и приема часто перекрываются. Например, предположим, что кадр 4 станции A [N(IIoc)=4] передается примерно в то же время, что и кадр станции В, который содержит N(Пр)=4. Станция А может ошибочно заключить, что ее кадр 4 является недействительным, в то время как станция В просто указывает, что следующим она ожидает кадр 4.
Более эффективный подход к исправлению ошибок состоит в том, чтобы указать ошибочный кадр явно. Рис. 5.5 и 5.6 иллюстрируют два метода реализации явных отрицательных подтверждений NAK. Ниже приведены моменты времени и события для процесса, который поясняется рисунком 5.5:
n, n+1, 2 Станция А посылает информационные кадры 6, 7 п 0. Станция В обнаруживает ошибку в кадре 7 и немедленно посылает кадр Неприем с порядковым номером приема 7. Станция В не ожидает санкции на реализацию контрольной точки, но посылает в качестве ответа REJ (Неприем) с установленным битом 1. Если бы станция В послала REJ в качестве команды (то есть с адресным полем, содержащимся в А), станция А потребовала бы ответить кадрами RR, RNR или REJ. Однако, поскольку REJ—это ответ, станция А немедленно осуществит повторную передачу искаженного кадра.
n + 3, 4, 5 Станция А повторно передает кадры 7 и 0 и устанавливает бит Р в момент времени 5.
n+6 Станция В подтверждает кадры 7, 0 и 1, используя Готов к. приему и порядковый номер приема, равный 2. Отметим: для полнодуплексных систем бит P/F обычно не используется для остановки потока данных, поскольку это снижает пропускную способность.
Ниже приведены моменты времени и события для процесса, который представлен на рис. 5.6:
n, n+1,2 Станция А передает информационные кадры 6, 7 и 0. Станция В обнаруживает ошибку в кадре 7 и передает Выборочный неприем с порядковым номером 7. Станция В не требует RR, RNR или REJ, так как кадр в n+2 не является командой.
n+3, 4 Станция А повторно передает только кадр 7 и впервые передает кадр 1. Поскольку это Выборочный неприем, кадр 0 не передается повторно.
n+5 Станция В подтверждает все остальные кадры с Готов к приему и порядковым номером приема 2.
5.1.7.Подмножества HDLC
Принятие базового множества (superset) протокола HDLC заложило прочную основу для реализации подмножеств протокола HDLC. Некоторые подмножества используются в настоящее время в промышленности. Эти подмножества показаны на дереве классификации сетей на рис. 2.5.
Структура базового множества HDLC дает возможность бит-ориентированным протоколам распознавать и использовать в разнообразных приложениях одни и те же процедуры. Приложения требуют для выполнения своих функций различных режимов работы и различных подмножеств команд и ответов. Например, требования, выдвигаемые многоточечными интерактивными приложениями, отличаются от требований двухточечных неинтерактивных систем.
Как указывалось ранее, тремя основными классами HDLCявляются
· класс UN (несбалансированный режим нормального ответа);
· класс UA (несбалансированный режим асинхронного ответа);
· класс ВА (сбалансированный асинхронный режим).
HDLC предусматривает множество факультативных расширений основных классов. Эти расширения используются фирмами-поставщиками и пользователями HDLC для обеспечения большего разнообразия в структуре базового подмножества. А теперь рассмотрим подмножество LAPD, используемое при приемопередаче посредством КВК.
5.2. LAPD
LAPD {Процедура доступа к D-каналу) является еще одним подмножеством структуры HDLC, хотя ее расширения выходят за рамки HDLC. LAPD предназначен для управления звеном данных в цифровых сетях с интеграцией служб ISDN, которые получают все большее развитие.
LAPD. Протокол независим от скорости передачи и требует полнодуплексного прозрачного канала. Протокол LAPD имеет формат кадра, очень похожий на формат HDLC. Более того, подобно HDLC, этот формат обеспечивает ненумерованные, супервизорные и информационные кадры. Таблица 9.2 показывает команды и отклики LAPD, а также различия и сходства между LAPD и HDLC. Протокол LAPD также позволяет осуществить операции по модулю 128. Управляющий байт, который определяет различия между форматами информационного, супервизорного и ненумерованного кадров, идентичен структуре байта в HDLC (формат этого байта показан на рис. 5.1). LAPD предусматривает два байта для адресного поля (рис. 5.7). Это особенно ценно для мультиплексирования многих функций в канале D. Адресное поле содержит биты расширения адресного поля, бит индикации команды или отклика, идентификатор точки входа в сервисное средство. (ИТВС) и идентификатор точки завершения (ИТЗ). Эти точка входов обсуждаются далее.
Таблица 5.1
Команды и отклики LAPD.
|
Формат |
Команды |
Отклики |
Управляющее поле |
Сходство с HDLC |
|||||||
|
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
||||
|
Передача данных |
1 (Информация) |
N(R) |
P |
N(S) |
0 |
Да |
|||||
|
Суперви-зор |
RR(готов к приему) |
RR(готов к приему) |
N(R) |
P/F |
0 |
0 |
0 |
1 |
Да |
||
|
RNR(не готов к приему) |
RNR(не готов к приему) |
N(R) |
P/F |
0 |
1 |
0 |
1 |
Да |
|||
|
REJ(отказ) |
REJ(отказ) |
N(R) |
P/F |
1 |
0 |
0 |
1 |
Да |
|||
|
0 |
0 |
1 |
P |
1 |
1 |
1 |
1 |
Да |
|||
|
Ненумерованный кадр |
SABM (установка асинхронного сбалансированного режима) |
DM (режим разъедине-ния) |
0 |
0 |
0 |
F |
1 |
1 |
1 |
1 |
Нет |
|
SI0(последо-вательная информация-0) |
SI0(последо-вательная информация-0) |
0 |
1 |
1 |
P/F |
0 |
1 |
1 |
1 |
Нет |
|
|
SI1(последо-вательная информация-1) |
SI1(последо-вательная информация-1) |
1 |
1 |
1 |
P/F |
0 |
1 |
1 |
1 |
Нет |
|
|
UI(ненумеро-ванная информация) |
0 |
0 |
0 |
P |
0 |
0 |
1 |
1 |
Да |
||
|
DISC (разъедине-ние) |
0 |
1 |
0 |
P |
0 |
0 |
1 |
1 |
Да |
||
|
UA (ненумеро-ванное подтвер-ждение) |
0 |
1 |
1 |
F |
0 |
0 |
1 |
1 |
Да |
||
|
FRMR (сброс кадра) |
1 |
0 |
0 |
F |
0 |
1 |
1 |
1 |
Да |
Расширение адресного поля предназначено для обеспечения большего числа битов в этом поле [19]. Если в первом бите байта адресного поля содержится единица, то тем самым указывается, что этот байт—последний в адресном поле. Следовательно, двухбайтовый адрес имеет значение расширения7 адресного поля, равное 0 в первом байте и равное 1 во втором байте. Бит расширения адресного поля позволяет использовать и НТВС в первом байте и ИТЗ во втором байте. Бит в поле указания команды/отклика (К/О) идентифицирует, чем является кадр — командой или откликом. Со стороны пользователя отсылаются команды с битом К/О, установленным в 0. Отклики с этой же стороны идут с битом К/О, равным 1. Сеть выполняет все обратным образом. Она отправляет команды, указывая 1 в бите К/О, а отклики — указывая 0. Все возможные условия установки, значений бита К/О сведены в табл. 5.2.
Таблица 5.2
Биты для поля указания команды/отклика
|
Бит от сети |
Бит от пользователя |
|
|
Прием команды |
1 |
0 |
|
Посылка отклика |
1 |
0 |
|
Посылка команды |
0 |
1 |
|
Прием отклика |
0 |
1 |
Идентификатор точки входа в сервисное средство (ИТВС) определяет точку, в которой услуги уровня связи данных препоставляются более высокому уровню.
Идентификатор точки завершения (ИТЗ) определяет либо единичный терминал, либо множество терминалов. ИТЗ назначается автоматически с помощью отдельной процедуры назначений Как ранее установлено, управляющее поле идентифицирует тип кадра а также номера последовательностей, используемые для поддержания режима окон и подтверждении между посылающими и принимающими устройствами.
В табл 5.1 показаны две команды и отклики, которые не существуют в множестве HDLC.

Рис 5.7 Формат кадра LAPD.
ФЛАГ- 01111110
БР- бит расширения адресного поля
БП- бит призыва команды/ответа
ИТДС- идентификатор точки доступа к сервисному средству
ИТВТ- идентификатор точки входа в терминал
И- информационное поле
ПКК- последовательность контроля кадра.
Совокупность ИТДС, ИТВТ, И, ПКК- идентификатор соединения звена данных.
Это последовательная информация 0 (S0) и последовательная информация 1(SI1). Команды SI0/SI1 предназначены для пересылки информации с использованием последовательно подтверждаемых кадров. Эти кадры содержат информационные поля. обеспеченные более высоким уровнем. Информационные команды проверяются с помощью последнего поля (SI) Бит P установлен в 1 для всех команд SI0/SI1. Отклики SI0 и SI1 используются при выполнении действий над единичным кадром для подтверждений приема кадров команд S0 и SI1 a тaкже для индикации потерь кадров или проблем с синхронизацией. LAPD не позволяет различать информационные поля в кадрах откликов SI0 и SI1. Естественно, информационные поля присутствуют в командных кадрах SI0 и SI1.
5.3. Разработка алгоритма передачи служебной информации
Блок-схема алгоритма реализации обработки супервизорных кадров представлена на чертеже ПГТУ.543702.006C6. Предполагается, что ранее был установлен асинхронный балансный режим (командой SABM). Блок-схема иллюстрирует продолжающийся сеанс связи.
Возможны следующие ситуации при обработке супервизорных кадров [22,23].
a)Прием REJ-кадра. По приему допустимого REJ-кадра канальный уровень должен произвести следующие действия:
b)
–
– N(r) записаную в поле управления принятого кадра;
–
–
–
–
c)
–
– N(r) записанную в поле управления принятого кадра;
–
–
d)
–
– N(r), записанную в поле управления принятого кадра;
–
Передача информационных кадров должна происходить в соответствии с нижеследующим:
1)
2)
3)
Все неподтвержденные информационные кадры, начиная с номера кадра, содержащемся в принятом REJ-кадре должны быть переданы. Остальные, еще не переданные кадры могут быть переданы вслед за ретранслированным информационными кадрами.
2. Прием RNR-кадра. По приему допустимого RNR-кадра, если канальный уровень не занят установкой режима, он должен выставить флаг BUSY у противоположного приемника и:
–
–
Канальный уровень не должен передавать информационных кадров приемнику, находящемуся в состоянии BUSY. Затем канальный уровень должен: считать N(r), содержащийся в принятом кадре подтверждением всем переданным информационным кадрам с N(s) до N(s) включительно и присвоить значение N(r) счетчику V(a); перезапустить Т200, пока не получен супервизорный ответ с установленным битом F.
Если T200 истек, то канальный уровень должен сбросить счетчик ретрансмиссий N200 и затем:
a)
–
–
–
b)
–
Канальный уровень, получивший супервизорный кадр с установленным Р битом должен как можно быстрее послать супервизорный ответ с установленным F битом, чтобы уведомить удаленную станцию занят ли его приемник.
По получению супервизорного ответа с установленным F битом канальный уровень должен обнулить Т200 и:
– противоположного приемника и канальный уровень может начать передачу новых информационных кадров или ретрансляцию затребованных.
–
Если супервизорная команда (RR, RNR или REJ) или супервизорный ответ со сброшенным F битом был получен в течении процесса запроса канальный уровень должен:
– F битом. В тоже время передача или ретрансмиссия информационных кадров не должна происходить до получения супервизорного ответа с установленным битом F или до истечения тайм-аута Т200.
– RNR команда или RNR ответ со сброшенным F битом, нужно сохранить флаг занятости противоположного приемника и, если у команду был установлен P бит, то передать соответствующий ответ с установленным F битом.
При получении команды SABM канальный уровень должен сбросить флаг занятости противоположного приемника.
Порядок отправки супервизорных кадров:
a)REJ-кадр, но затребованный информационный кадр не был получен, то посылается RR-кадр;
b)REJ-кадр, то посылается REJ-кадр;
c)посылается RNR-кадр;
d)RR-кадр;
Прием и передача информационных кадров реализованы на аппаратном уровне в контроллерах SIEMENS SAB82C525 и в рассмотрение в данной работе не входит.
6. Охрана труда и безопасность жизнедеятельности
6.1.Анализ опасных и вредных факторов производства при работе с ВДТ и ПЭВМ
Опасные факторы :
- повышенное значение напряжения в электрической цепи
Потенциально вредные факторы:
- недостаточная освещенность рабочей зоны;
- повышенная пульсация светового потока (от люминесцентных ламп);
- отсутствие или недостаток естественного света;
- повышенный уровень статического потенциала;
- монотонность труда (продолжительность работы с дисплеями при 8 часовом рабочем дне с учетом перерывов каждый час на 5-10 мин.);
- перенапряжение анализаторов (количество обрабатываемых символов за 4 часа работы
- повышенная ионизация воздуха
- продолжительная статичная поза оператора.
Отдельно следует отметить другую характерную особенность рабочих мест с ВДТ и ПЭВМ- повышенный уровень излучения.
ПЭВМ являются источниками широкополосных электромагнитных излучений:
- мягкого рентгеновского;
- ультрафиолетового (УФИ) 200-400 нм;
- видимого 400-700 нм;
- ближнего инфракрасного 700-1050 нм;
- радиочастотного диапазона 3 кГц - 30 МГц;
- инфранизкочастотного 0-3 кГц;
- электростатических полей (ЭСП).
Экспозиционная мощность дозы рентгеновского излучения в любой точке пространства на расстоянии 5 см от поверхности экрана ПЭВМ не должна превышать 10.8 мкР/час.
Ультрафиолетовое излучение в диапазоне 200-315 нм не должно превышать 10 мкВт/м2, а в диапазоне излучений 315-400 нм и видимом диапазоне излучений от 400 до 700 нм – 0.1 Вт/м2, в ближнем инфракрасном излучении (700-1050 нм) – 0.05 Вт/м2, а в дальнем инфракрасном излучении (1050 нм- 1 мм) – 4 Вт/м2.
В нижеследующих разделах с необходимой степенью подробности даны рекомендации по защите персонала от перечиленных вредных и опасных факторов.
6.2. Оптимизация информации, представляемой дисплеем
В настоящее время в связи с широким развитием компьютерной техники и возрастанием объёмов информации возникает проблема оптимального размещения информации на экране дисплея. Кроме того следует учитывать и психофизиологическое влияние, которое неизбежно оказывает дисплей и выводимая на него информация на человека.
Дисплей - это телевизионный экран на котором высвечиваются результаты выполнения программ. Под информацией будем подразумевать любые сообщения выводимые компьютером, кактекстовые, так и графические. Рассмотрим основные принципы оптимизации информации, предъявляемой дисплеем, а так же её психофизиологическое воздействие на человека.
Проблема оптимизации информации, возникает прежде всего из-за ограниченности площади экрана дисплея. Как показывает опыт, в не зависимости от размеров дисплея количество информации, которую необходимо отобразить, всегда больше. Кроме того, при размещении информации на дисплее, необходимо учитывать её психофизическое воздействие, а также физиологические особенности человека. Отображаемая информация должна легко восприниматься человеком и оказывать минимальное отрицательное физиологическое воздействие. При оптимальном размещении информации, она хорошо воспринимается человеком, а значит он меньше устаёт, в результате чего повышается производительность труда. При непрофессиональном подходе к данному вопросу, восприятие затруднено, что отрицательно влияет на работоспособность и самочувствие. В крайнем случае возможно возникновение патологий зрения в виде близорукости и других болезней, выражающихся в головной боли и зрительной утомляемости и т.д.
Известно, что различные цвета окружающей среды человеком воспринимаются по разному и кроме того они оказывают психофизиологическое воздействие.Тёмные цвета, в том числе чёрный, оказывают очень существенное воздействие - вызывают пессимистическое настроение, чувство угнетения, тяжести, снижают эффективность освещения. Чёрный цвет весьма подходит для создания чётких контрастов. Предметы окрашенные в чёрный цвет, кажущийся более тяжёлыми. Насыщенные, а также сочетания цветов при большом цветовом контрасте оживляют пространство, поднимают настроение и стимулируют деятельность органов чувств. Эти цвета рекомендуется использовать как сигнальные в целях безопасности, а также для идентификации зрительного образа. Светлые (с большей яркостью) и насыщенные цвета применяются на менее освещённых площадях, чтобы достичь наибольшей видимости и различия. Они улучшают контрасты по яркости на рабочих местах, стимулируют поддержание порядка. Предметы - носители этих цветов - кажутся более лёгкими. Насыщенные, а также мало насыщенные, разбеленные цветовые оттенки действуют успокаивающе, способствуя сосредоточенности внимания и рекомендуются для помещений, предназначенных для ответственной умственной деятельности. Цвет является не только средством решения композиционных вопросов производственной среды, но и средством информации и обеспечения безопасности труда в производственных условиях. Для каждого цвета или сочетания цветов характерно определённое психологическое воздействие, что надо учитывать при формировании производственной среды. Правильный выбор цвета может способствовать положительному психофизиологическому воздействию на человека, действовать успокаивающе, повышать производительность его труда. И наоборот, неквалифицированное цветовое решение вызывает зрительное утомление, ухудшает настроение, вызывает нервозность и снижение производительности и качества труда.
Цвет характеризуется тремя параметрами: цветовым тоном, насыщенностью и яркостью. При размещении информационных объектов на экране дисплея рекомендуется соблюдать следующие гигиенические требования:
- размер, отображаемых объектов должен быть оптимальным, в частности, при отображении текстовой информации шрифт отображения текста не должен быть слишком мелким;
- строки текстовой информации не должны "наползать" друг на друга;
- используемые цвета должны быть подобраны из одной гаммы;
- информация должна выводиться с достаточной степенью контрастности и яркости;
- оптимальным при отображении считается два цвета.
Для человека принято различать зоны зрительного наблюдения. В информационном поле (см. рис. 6.1) обычно различают 3 зоны. В зоне 1 располагают очень часто используемую информацию, требующую точного и быстрого считывания. В зоне 2 - часто используемую информацию, требующую менее точного и быстрого считывания. В зоне 3 - располагают редко используемую информацию.
Рис.6.1. Зоны зрительного наблюдения
Современное программное обеспечение строится таким образом, чтобы, кроме изменения цветов отображения, пользователь мог изменять размещение и протяжённость графических объектов. Примером может служить серия операционных систем Windows (в переводе с английского - окна). В этих системах реализован графический интерфейс, благодаря которому информация отображается в отдельных окнах, которые можно произвольно перемещать по экрану, масштабировать и т.п. ИнтерфейсWindows NT является графическим пользовательским интерфейсом (graphical user interface, GUI), т.е. в нем для облегчения работы широко используется графическое, интуитивно понятное, представление информации. Например чтобы напечатать документ, пользователю предлагается щелкнуть на кнопке с изображением принтера; если же при подготовке документа его текст не помещается в окне, пользователь может увеличить размер окна, просто перетащив его границу в нужном направлении.
Таким образом, интерфейсWindows NT ориентирован прежде всего на удобство работы пользователя. При этом используется концепция рабочего стола - вы можете открыть столько документов, сколько нужно, "достать" более важный документ "из-под" других документов, а также закрыть папку, с которой больше не работаете. Конечно же, количество задач, выполняемых вами одновременно, ограничено мощностью вашего компьютера, но интерфейс Windows значительно облегчает работу в многозадачном режиме.
Оконный интерфейс воплощает концепцию, известную как многодокументный интерфейс (Multiple Document Interface - MDI). Это означает, что одно приложение, например, Microsoft Exel 97 может открыть несколько окон сразу, причем каждое из них связано со своим документом. Все эти окна документов существуют внутри общего окна приложения Exel Но не следует путать название окно документа с типом информации, содержащейся в нем. Даже если конкретные файлы, которые вы используете в Exel, являются электронными таблицами, эти окна все равно называются окнами документов. Окно Exel называют родительским окном, а документы электронных таблиц, открытых в Exel, - дочерними окнами. Эта концепция используется многими приложениями Windows, в которых пользователь создает документы или файлы.
Отдельное внимание заслуживает исследовательское программное обеспечение. В этих пакетах используется объектно-ориентированная среда разработки и они обычно допускают неограниченное количество динамических элементов отображения в каждом окне. Такие программыпозволяют быстро производить исследования и получать точные результаты.
При разработке проектов любой сложности автор рекомендует использование графического, интуитивно-понятного интерфейса WindowsNT , благодаря его возможностям возможен оперативный контроль большого числа параметров.
6.3.Охрана труда при работе с дисплеем.
а) Краткая характеристика дисплея
Приведем основные характеристики устройств отображения информации.
·Размер экрана.
Размер экрана, определяемый диагональю экрана, в первую очередь должен удовлетворять требованиям выполнения задач, решаемых с помощью дисплея, т.е. на экране должны отображаться:
- необходимый участок пространства одновременного наблюдения в определенных масштабах, обеспечивающих требуемые точностные характеристики (например, определение координат, размеров объектов и т. д.);
- максимальный объем информации для принятия обоснованных решений.
Геометрия растра.
Размеры растра определяются выбранными размерами экрана, а его формат и ориентация на экране – полем ясного зрения оператора. В соответствии с этим формат кадра обычно принимается равным 4:3.
·Число строк растра.
Число необходимых строк растра влияет на распознавание наименьшего объекта (детали) на экране.
·
·Частота регенерации(обновления) экрана.
·Тип развертки.
Из существующих методов разложения (построчного, чересстрочного, спирального, синусоидного) наиболее целесообразно использовать построчную развертку, обеспечивающую наиболее высокое качество изображения. Когда это осуществить невозможно, используется чересстрочное разложение; при этом необходимо обратить особое внимание на качество синхронизации и регулирования аппаратуры в целях устранения явления "спаривания строк", приводящего у ухудшению четкости по вертикали и увеличению заметности строчной структуры растра.
·Растровые искажения.
Зрительная система человека весьма чувствительна к растровым искажениям. Они особенно заметны и неприятны при наблюдении объектов, перемещающихся по экрану.
Стабильность растра.
Различные виды нестабильности растра (периодическое "подергивание" кадра, смещение части строк и т. д.) весьма отрицательно сказываются на зрительной системе и психике оператора.
·Четкость изображения.
Величина необходимой четкости характеризуется числом строк разложения в растре. С течением времени работы дисплея из-за старения его различных узлов четкость изображения ухудшается.
Число необходимых градаций яркости.
Число необходимых градаций яркости является одним из основных параметров, определяющих условия распознаваемости деталей изображения по соотношению их яркостей.
·Тип контраста.
На практике используют как позитивный (темные отметки на светлом фоне), так и негативный (светлые отметки на темном фоне) контраст. Позитивный более предпочтителен.
·Яркостные искажения.
Яркостные искажения изображения (недостаточная резкость и отчетливость контуров объектов, окантовки, повторные изображения, тянущиеся продолжения) могут также значительно ухудшить условия работы оператора, вызывая повышенное психофизиологическое напряжение.
·Шаг пикселов.
Для нормальной работы оператора шаг пикселов должен составлять 0.28 мм или меньше.
·Помехи.
Различного вида помехи (флуктуационные и периодические) снижают четкость и контраст изображения, сокращают количество различимых градаций яркости, периодически изменяют яркость всего изображения, создают дополнительные подвижные и неподвижные светло-темные полосы, а поэтому вызывают у оператора неприятное ощущение и ухудшают условия различимости деталей (объектов).
б)Характеристика вредных и опасных факторов, действующих на человека, работающего с дисплеем
Одним из путей повышения эффективности операторской деятельности является оптимизация условий труда, направленная на снижение зрительного и общего утомления. По сведениям различных организаций и субъективным отзывам операторов работа с дисплеями, как правило, сопровождается значительным зрительным и общим утомлением. В результате проведенного обследования на первом месте оказались жалобы на переутомление зрительного анализатора. Симптомами зрительной усталости являются болезненные ощущения и раздражения глаз (затуманивание зрения, слезотечение, ощущение "песка", тяжести, жжения, рези в глазах и т. п.). Появляются пульсации за глазными яблоками, трудности с фокусировкой и двоение в глазах. Часто возникают головные боли.
Причинами, вызывающими зрительное утомление, могут быть яркостные мелькания, строчная структура, недостаточная четкость и контрастность изображения, растровые искажения и т. п., а также наличие в поле зрения слепящих источников света и бликов на поверхности экрана.
Наличие в поле зрения оператора слепящих источников резко снижает контрастную чувствительность глаза. Особенно отрицательно их влияние проявляется при низких освещенностях в помещении, когда даже слабые источники обладают слепящей яркостью. Свет яркого источника, попадая в глаз, рефлекторно вызывает двигательный импульс, заставляющий направить взгляд на источник, в результате чего нарушается фиксация взгляда на объекте. От ярких раздражителей остаются длительные последовательные образы, затрудняющие выполнение работы.
Большой перепад яркостей способствует постоянному расширению и сокращению зрачка, что вызывает соответственно напряжение мышц, обуславливающих аккомодацию и конвергенцию, и приводит к утомлению зрения. Помимо этого, большой перепад яркостей приводит к постоянной перестройке воспринимающего аппарата глаза (работы то сумеречного, то дневного зрения), к затруднениям работы аккомодационного и мышечного аппарата, что также является источником утомления.
ЭВМ на электронно-лучевых трубках являются источниками широкополосных электромагнитных излучений, что также неблагоприятно сказывается на зрении оператора.Таким образом, на условия работы оператора отрицательно сказываются: появление в поле зрения ярких ламп; большой перепад яркости экрана и уровня общей освещенности.
Часто неправильное расположение оборудования вынуждает к неподвижности, которая может привести к болям в спине, мышцах шеи и плеч и головным болям. В этой связи существенное внимание следует уделить проектированию сидений с опорой, необходимой высоте стола, регулярным перерывам в работе, производственной гимнастике.Утомление, как зрительное, так и общее, развивается особенно быстро при длительном дискомфорте, в результате работы в плохих, не отвечающих общим эргономическим требованиям, условиях окружающей среды.Характерными симптомами общего утомления являются раздражительность, снижение работоспособности, отсутствие заинтересованности, вовлеченности в работу, головные боли, депрессия, нервность и бессонница.
Рассмотрим основные мероприятия по защите персонала от воздействия вредных и опасных факторов.
6.4. Основные мероприятия по защите персонала от воздействия вредных и опасных факторов.
а) Организация рабочего места.
Рабочее место с ПЭВМ должно быть организовано в соответствии с СанПиН 2.2.2.542-96. Помещение с вычислительной техникой должно иметь естественное освещение. Окона должна быть ориентированы на север, северо-восток. Схема расположения рабочих мест относительно светопроемов показана на рис. 2.
Рис. 6.2
Рабочее помещение оператора ПЭВМ не должно быть расположено в подвале или цокольном этаже, а также должно быть изолировано от помещений, имеющих повышенные уровни шума (машинные залы, гимнастический зал, мастерские и др.). Площадь помещения должна приниматься из расчета не менее 6 кв. м на одно рабочее место, высота помещения должна составлять не менее 4 метров. Поверхность пола должна быть ровная, без выбоин, нескользящая и удобная для очистки, обладающая антистатическими свойствами.
К столам с ПЭВМ подводится электропитание с обеспечением электробезопасности. Длина (слева направо) одноместного рабочего стола должна быть не менее 70 см, ширина – должна обеспечивать место перед клавиатурой 30 см для расположения опоры предплечий рук для снятия статического напряжения с мышц плечевого пояса. Поверхность стола для установки монитора должна быть горизонтальной, а поверхность, на которой находится клавиатура, – наклонной (угол наклона 12-15 градусов).
Высота края стола, обращенного к работающему за видеомонитором, и стула над полом должны приниматься в соответствии с ростом оператора по нижеследующим данным (СанПиН 2.2.2.542-96) :
- при росте 146-160 см - высота поверхности стола должна составить 640 мм, высота пространства для ног - не менее 580 мм;
- при росте 161-175 см - высота поверхности стола должна составить 700 мм, высота пространства для ног - не менее 640 мм;
- при росте выше 175 см - высота поверхности стола должна составить 760 мм, высота пространства для ног - не менее 700 мм.
При наличии высокого стола, несоответствующего росту оператора, необходимо пользоваться регулируемой по высоте подставкой для ног.
Рабочее помещение оператора ПЭВМ должно быть снабжено стульями с меняющимися по высоте полумягкими сиденьями и профилированными спинками, а также позволяющими осуществлять поворот сиденья и спинки стула в пределах± 180 градусов.
При работе на ПЭВМ оператор должен соблюдать правильную посадку. В соответствии с ростом должен быть подобран стол и стул. Край сиденья стула должен заходить на 3-5 см за край стола, обращенного к оператору. Спина в области нижних углов лопаток должна иметь опору. Голова слегка наклонена вперед (5-7 градусов). Предплечья должны опираться на поверхность стола (перед клавиатурой) для снятия статического мышечного напряжения с плечевого пояса и рук. Угол, образуемый предплечьем и плечом, а также голенью и бедром, должен быть не менее 90 градусов.
Уровень глаз при вертикальном расположении экрана должен приходиться на центр экрана или 2/3 его высоты.Дисплей на рабочем месте должен быть установлен ниже уровня глаз оператора. Угол наблюдения экрана оператором относительно горизонтальной линии взгляда в соответствии с ГОСТ Р 50923-96 не должен превышать 60-ти градусов. Линия взора должна быть перпендикулярна центру экрана и оптимальное ее отклонение от перепендикуляра, проходящего через центр экрана в вертикальной плоскости, недолжно превышать ± 5 градусов, допустимое - ± 10 градусов (СанПиН 2.2.2.452-96).
Оптимальный обзор в горизонтальной плоскости от центральной оси экрана должен быть в пределах ± 15 градусов, допустимый ± 30 градусов. При рассматривании информации, находящейся в крайних положениях экрана монитора, угол рассматривания (угол, ограниченный линией взора и поверхностью экрана) должен быть не менее 45 градусов. Угол рассматривания следует соблюдать при необходимости работы на ПЭВМ вдвоем. Чем больше угол рассматривания, тем легче воспринимать информацию с экрана видеомонитора и меньше будут уставать глаза.
Угол рассматривания символов на экране монитора должен быть не менее 20 угловых минут. Его можно вычислить по формуле:
 ,
,
гдеB – высота буквы и цифры в мм;
L – расстояние глаз до объекта информации на экране в мм;
 – угол рассматривания в угловых минутах.
– угол рассматривания в угловых минутах.
Оптимальное расстояние глаз до экрана должно быть в пределах 0.6-0.7 м, допустимое – не менее 0.5 м.
Клавиатуру следует располагать на поверхности стола на расстоянии 100-300 мм от края, обращенного к пользователю, или на специальной, регулируемой по высоте рабочей поверхности, отделенной от основной столешницы.
Освещение помещений с ВДТ и ПЭВМ должно быть организовано в соответствии с СанПиН 2.2.2.542-96. Требования к расположению рабочих мест относительно источников естественного света изложены выше. Искусственное освещение в помещениях эксплуатации ВДТ и ПЭВМ должно осуществляться системой общего равномерного освещения. В производственных и административно-общественных помещениях, в случае преимущественной работы сдокументами, допускается применение системы комбинированного освещения ( к общему освещению дополнительно устанавливаются светильники местного освещения, предназначенные для освещения зоны расположения документов).
Окраске внутренних поверхностей следует придавать матовую фактуру, так как в поле зрения оператора не должны попадать блестящие поверхности, способные создать блики отражения на экране. Соотношение яркости между рабочими поверхностями не должно превышать 3:1 - 5:1, а между рабочими поверхностями и поверхностями стен и оборудования 10:1.
Для освещения помещений с ВДТ и ПЭВМ должны применятьсяпреимущественно люминесцентные лампы типа ЛБ. При устройстве отраженного освещения в производственных и административно-общественных помещениях допускается применение металлогалогенных ламп мощностью до 250 Вт. Допускается применение ламп накаливания в свектильниках местного освещения.
Освещенность рабочего стола в зоне размещения рабочего документа должна быть 300-500 лк.
Общее освещение следует выполнять в виде сплошных или прерывистых линий светильников, расположенных сбоку от рабочих мест, параллельно линии щзрения пользователя при рядном расположении ВДТ и ПЭВМ. При периметральном расположении компьютеров линии светильников должны располагаться локализованно над рабочим столом ближе к его переднему ераю, обращенному к оператору. Яркость светильников общего освещения в зоне уголов излучения от 50 до 90 градусов с вертикалью в продольной и поперечной плоскостях должна составлять не более 200 кд/кв.м, защитный угол светильников лдолжен быть не менее40 градусов. Светильники местного освещения должны иметь не просвечивающий отражатель с защитным углом не менее 40 градусов.
Коэффициент пульсации не должен превышать 5%, что должно обеспечиваться применением газоразрядных ламп в светильниках общего и местного освещения с высокочастотными пускорегулирующими аппаратами для любых типов светильников.
Уровень ионизации воздуха в помещении должен по возможности быть приближен к оптимальным значениям:
- число ионов в 1 см. куб. воздуха для n+ 1500...3000, для n- - 3000...5000.
6.5.Влияние психофизиологических факторов.
При профессиональном отборе лиц на зрительно-напряженные операции большое значение должно придаваться определению следующих психофизиологических функций работающих:
- скорости переработки информации;
- вниманию (сосредоточенности);
- скорости зрительного восприятия;
- зрительно-моторной координации;
- оперативной памяти;
- устойчивости ясного видения.
6.6. Организация рабочего времени .
Повышение производительности труда, сохранение высокой работоспособности, снижение утомляемости обеспечивает рационально организованный режим труда и отдыха. Он должен устанавливаться с учетом психофизиологической напряженности труда работающих, определяемой на основе детального психофизиологического анализа трудовой деятельности.
Рациональный режим труда и отдыха предусматривает строгое соблюдение регламентированных перерывов и активное их проведение, регулярные занятия производственной гимнастикой; равномерное распределение сменного задания и т. п.
Виды трудовой деятельности делятся на три группы:
группа А - работа по считыванию информации с экрана ВДТ или ПЭВМ с предварительным запросом;
группа Б - работа по вводу инфомации;
группа В - творческая работа с ПЭВМ.
Для видов трудовой деятельностиустанавливаются 3 категории тяжести и напряженности работы с ПЭВМ, которые определяются:
- для группы А - по суммарному числу считываемых знаков за рабочую смену, но не более 60 000 знаков за смену;
- для группы Б - по суммарному числу считываемых или вводимых знаков за рабочую смену, но не более 60 000 знаков за смену;
- для группы В - по суммарному времени непосредственной работы с ВДТ и ПЭВМ за рабочую смену, но не более 6 часов за смену.
Так как инженерно-конструкторская деятельность, сопряженная с новейшими средствами автоматизации проектирования, так же как и любое другое техническое творчество отвечают признакам группы В, то в дальнейшем целесообразно рассмотреть только те правила и рекомендации по организации рабочего дня, которые применимы к этой группе трудовой деятельности, в соответствии с СанПиН 2.2.2.542-96.
Время регламентированных перерывов в течение 8-ми часовой рабочей смены тогда следует устанавливать следующим образом:
- для группы I (суммарное время непосредственной работы с ВДТ и ПЭВМ до 2.0 ч) - суммарное время перерывов 30 мин.;
- для группы II (суммарное время непосредственной работы до 4.0 ч ) - 50 мин.;
- для группы III (суммарное время непосредственной работы до 6.0 ч ) - 50 мин.;
Время непрерывной работы с экраном не должно превышать 2 часа.
При работе с ВДТ и ПЭВМ в ночную смену (с 22 до 6 часов), независимо от категории и вида трудовой деятельности, продолжительность регламентированных перерывов должна увеличиваться на 60 минут. При 8-ми часовой рабочей смене и работе на ВДТ и ПЭВМ регламентированные перерывы следует устанавливать:
- для I категории работ через 2 часа от начала рабочей смены и через 2 часа после обеденного перерыва продолжительностью 15 минут каждый;
- для II категории работ через 2 часа от начала рабочей смены и через 1.5-2 часа после обеденного перерыва продолжительностью 15 минут каждый или продолжительностью 10 минут через каждый час работы;
- для III категории работ через 1.5-2 часа от начала рабочей смены и через 1.5-2 часа после обеденного перерыва продолжительностью 20 минут каждый или продолжительностью 15 минут через каждый час работы;
Во время перерывов целесообразно выполнять комплексы упражнений, направленные на компенсацию двигательной недостаточности, а также упражнения, направленные на нормализацию мозгового кровообращения и на снятие зрительного напряжения. Производственная гимнастика на зрительно-напряженных операциях должна состоять из 6-8 упражнений с максимальной нагрузкой на 4-е упражнение, последнее упражнение должно способствовать переключению на производственную работу. Мышечные усилия комплекса упражнений должны быть умеренными, темп – средним. После окончания производственной гимнастики должен быть интервал 2-3 минуты перед работой. Менять комплекс упражнений следует не реже 1 раза в неделю.
Разработку комплексов упражнений гимнастики и контроль за их выполнением осуществляет методист или инструктор по физической культуре, проведение гимнастики на рабочих местах – выборное лицо.
Производственная гимнастика на рабочих местах должна быть статичной, с малой амплитудой движений.
Во время регламентированных перерывов и в начале работы в течение 2-3 минут следует выполнять, сидя на рабочем месте, специальные упражнения для глаз, способствующие усилению кровообращения, повышению тонуса глазных мышц, уменьшению утомления глаз. Следует обеспечить каждого памяткой специальных упражнений для глаз.
Вводный инструктаж по выполнению гимнастики для глаз проводит медсестра здравпункта.
6.7. Требования санитарно-гигиенических норм.
Конструкция монитора должна предусматривать меры, обеспечивающие хорошую разборчивость изображения, независимо от внешней освещенности.
В зависимости от назначения и области применения видеотерминалы могут быть разделены на следующие группы:
группа А – цветные мониторы только для демонстрационных целей;
группа Б – цветные мониторы для персональной работы;
группа В – монохромные мониторы.
Мониторы должны иметь антибликовое покрытие (кроме группы А) с коэффициентом отражения не более 0,5. Покрытие должно также обеспечивать снятие электростатического заряда с поверхности экрана, исключать искрение и накопление пыли.
На лицевой стороне панели монитора должны находиться ручки управления регуляторами яркости, контрастности, звука, а также кнопка выключения питания с индикатором. На боковой панели должны под крышкой располагаться регуляторы: частоты кадров, частоты строк, линейность и размеры по вертикали, центровка по горизонтали, для цветных – переключение на режим монохромных мониторов.
Монитор должен иметь регулировку угла наклона по горизонтальной оси в пределах ± 20 градусов и по вертикальной оси – ± 30 градусов. Корпус монитора должен обеспечивать защиту от ионизирующих и неионизирующих излучений.
При частоте кадровой развертки (регенерации изображения) не менее 70 Гц необходимо пользоваться позитивным изображением, при частоте 50 Гц – негативным изображением. Яркостной контраст цветных знаков и фона должен быть не менее 60 %.
Клавиатура не должна быть жестко связана с монитором. По цвету должна приближаться к цвету корпуса и иметь опорное приспособление. Длина клавиатуры должна позволять пользоваться двумя руками. В клавиатуре должна быть предусмотрена возможность звуковой обратной связи от включения клавиши. Клавиши, корпус клавиатуры должны иметь матовую поверхность.
6.8. Выводы
Внедрение вышеизложенных мероприятий по охране труда направлено на снижение зрительного и общего утомления иявляется одним из путей повышения эффективности операторской деятельности.
7. Экономическое обоснование проектирования и изготовления платы КВК.
7.1. Качественная оценка платы КВК.
В настоящее время цифровые системы передачи данных все больше находят свое применение в современныхсистемахсвязи. Это объясняется их высокими технико-экономическими показателями, а также предлагаемыми видами услуг с точки зрения пользователя.
Системы PDH, широко применяющиеся в настоящее время, являются одним из видов цифровых систем передачи, предназначенных для временного уплотнения телефонных каналов. Следует отметить, что на сегодняшний день возможности данной аппаратуры с технической стороны себя исчерпали. Уже несколько последних лет данная аппаратура не может полностью удовлетворить требованиям предъявляемым к современным средствам связи, от которых требуется более высокая гибкость, интеллектуальность, компактность, надежность, универсальность. Изготовление аппаратуры систем PDH сегодня становится экономически невыгодным из-за высокой его себестоимости и неудовлетворительных технических показателей.
Дальнейшее развитие российской связи невозможно без перехода на более современные, удобные и интеллектуальные системы связи- в том числе и на SDH. Разработанный контроллер встроенных каналов являнтся неоьемлемой частью системы управления разветвленными сетями SDH- это звено, осуществляющее передачу управляющей информации TMN магистральным станциям SDH.
К основным техническим достоинствам платы КВК следует отнести:
1) реализация на современной элементной базе;
2) использование современных технологий производства (двухсторонний поверхностный монтаж, многослойные печатные платы);
3) малые габаритные размеры;
4) полная конструктивная совместимость с существующим оборудованием.
7.2. Расчет себестоимости платы КВК.
Для того, чтобы количественно показать экономическую эффективность разработки оценим срок окупаемости единовременных затрат на разработку платы [2].
7.2.1. Определение единовременных затрат.
Единовременные затраты связаны с проектированием. Устройство КВК разрабатывается одним инженером-проектировщиком и одним инженером-программистом. Месячная ставка инженера равна пятнадцати минимальным зарплатам, т.е.
 (1)
(1)
где 83,49 руб. – минимальная заработная плата (на май 1999 года ).
Этапы и производительность работ инженера–проектировщика указаны в табл. 7.1.
Таблица 7.1
Этапы работы инженера–проектировщика
|
Номер этапа |
Название этапа |
Время, месяцы |
|
1 |
Получение ТЗ,уяснение цели |
0,2 |
|
2 |
Разработка тех. Предложения, в т.ч. работа с литературой |
1 |
|
3 |
Разработка технического проекта |
1,5 |
|
4 |
Разработка рабочего проекта |
2 |
|
5 |
Разработка спец. Программы |
1 |
|
6 |
Отладка |
1,5 |
|
Итого |
=SUM(ABOVE) 7,2 |
Этапы и производительность работ инженера–программиста указаны в табл.7.2.
Таблица 7.2
Этапы работы инженера–программиста
|
Номер этапа |
Название этапа |
Время, Месяцы |
|
1 |
Получение тех. задания, уяснение цели |
0,1 |
|
2 |
Разработка алгоритма |
1 |
|
3 |
Написание программы |
2 |
|
4 |
Отладка |
1 |
|
Итого |
=SUM(ABOVE) 4,1 |
Единовременные затраты, затраты на проектирование, составят заработную плату инженера–проектировщика и инженера–программиста с начислениями плюс накладные расходы.
ЕЗ=ЗПинж.проек.+ ЗПинж.прог.+ НР; (2)
ЗПинж
= Ст.м проек.+Фпрог.)/Р) /100)
R/100)
/100); (3)
проек.+Фпрог.)/Р) /100)
R/100)
/100); (3)
гдеСт.м — месячная ставка инженера Ст.м=1252,35 руб.;
Ф — количество дней, в течение которых выполняется данная работа;
Р – количество рабочих дней в месяце;
П – премия 35%;
R – районный коэффициент 15%;
Обд – отчисление в бюджет.
Статьи отчислений в бюджет приведены в табл. 7.3.
Таблица 7.3.
Статьи отчислений
|
Номер статьи |
Наименование статьи |
Проценты |
|
1 |
Пенсионный фонд |
28% |
|
2 |
Фонд занятости |
1,5% |
|
3 |
Мед. Страхование (территориальный фонд) |
3,4% |
|
4 |
Мед. Страхование (федеральный фонд) |
0,2% |
|
5 |
Соц. Страхование |
5,4% |
|
6 |
Транспортный налог |
1% |
|
Итого |
39,5% |
ЗПинж = 1252,35/100) /100) /100)=30648,6руб.
Накладные расходы составят 80% от заработной платы инженеров:
НР=0,8инж =0,8(4)
В итоге единовременные затраты, затраты на проектирование платы КВК составят:
ЕЗ = ЗПинж + НР =30648,6 + 24518,9 = 55167,5руб. (5)
7.2.2. Расчет заработной платы
7.2.2.1. Расчет основной заработной платы
Для расчета основной заработной платы подсчитаем время, которое рабочий затратил на изготовление одного изделия и умножим на стоимость одного нормо‑часа Снч. Время выполнения операций при изготовлении КВК приведено в табл. 4.
Таблица 7.4.
Время выполнения основных операций
|
Номер операции |
Операция |
Трудоемкость, Тшт, ч |
Снч, руб. |
Рсд, руб/ч |
|
1 |
Комплектовочная |
0,6 |
10 |
6 |
|
2 |
Подготовительная |
1 |
10 |
10 |
|
3 |
Сборочно-монтажная |
0,6 |
10 |
6 |
|
4 |
Очистка платы от флюса |
0,180 |
10 |
1,8 |
|
Итого |
2,380 |
S Рсд=23,8 |
Рсд=СнчТшт, (6)
где Снч=10 руб.
ЗПосн
= S
Рсд/100)
R/100),(7)
гдеЗПосн – основная заработная плата;
П – премия выплачиваемая рабочему, равная 25%;
R – районный коэффициент, равный 15%.
ЗПосн = 23,8 /100)
/100)=
34,21 руб.
7.2.2.2. Расчет дополнительной заработной платы
Дополнительная заработная плата берется от основной заработной платы:
ЗПдоп=ЗПосн/100), (8)
где ЗПдоп – дополнительная заработная плата;
ЗПосн – основная заработная плата;
Н - норматив 15%.
ЗПдоп=34,21/100)=5,13
руб.
7.2.3. Расчет материальных затрат
7. 2. 3. 1. Расчет стоимости комплектующих изделий
Стоимости комплектующих изделий для платы КВК приведены в табл.7.5.
Стоимость комплектующих изделий
Таблица 7.5.
|
N поз. |
Наименование изделия |
Марка изделия |
К-во |
Стоимость, $ USA за 1 шт. |
Суммарная стоимость, $ USA |
|
1. |
Конденсатор |
KC 33pF 0805 5 % 50/63V NPO RO BLI |
10 |
0.5 |
5 |
|
2. |
Конденсатор |
FR 100nF 250V-10% RM10 PA AVI |
2 |
0.05 |
0.1 |
|
3. |
Конденсатор |
SE 100UF 160V-20% B-LO |
1 |
0.5 |
0.5 |
|
4. |
Конденсатор |
KC3,3nF 0805 10% 50/63V X7R RO BLI |
1 |
0.05 |
0.05 |
|
5. |
Конденсатор |
KC100nF 0805 10% 50/63V X7R RO BLI |
19 |
0.05 |
0.95 |
|
6. |
Конденсатор |
KC 10nF 0805 10% 50/63V X7R RO BLI |
1 |
0.05 |
0.05 |
|
7. |
Резонатор |
HC-49/U 16.384 MHz |
1 |
2.3 |
2.3 |
|
8. |
Резонатор |
B2-B4 HC-49/U24.000 MHz |
3 |
1.7 |
5.1 |
|
9. |
Резонатор |
B5 HC-49/U10.000 MHz |
1 |
1.9 |
1.9 |
|
10. |
Микросхема |
AT29C512-70JC |
3 |
6.3 |
18.9 |
|
11. |
Микросхема |
UM62512V-70L |
3 |
7.0 |
21.0 |
|
12. |
Микросхема |
NM485D |
1 |
59.9 |
59.9 |
|
13. |
Микросхема |
EPF10K10TC144-4 |
1 |
16.3 |
16.3 |
|
14. |
Микросхема |
DS87C520-QCL |
3 |
31.97 |
95.01 |
|
15. |
Микросхема |
MAX491ECSA |
1 |
27.55 |
27.55 |
|
16. |
Микросхема |
MAX3223CAP |
1 |
4.45 |
4.45 |
|
17. |
Микросхема |
SAB 82525 N |
3 |
18.6 |
55.8 |
|
18. |
Микросхема |
EPC1LC20 |
1 |
9.45 |
9.45 |
|
19. |
Микросхема |
MT8985AP |
1 |
28.38 |
22.38 |
|
20. |
Микросхема |
SN74FB1650 |
1 |
22.44 |
22.44 |
|
21. |
Микросхема |
PIC16C72-20/SO |
1 |
6.98 |
6.98 |
|
22. |
Микросхема |
TAM25-4811 |
1 |
85.99 |
85.99 |
|
23. |
Резистор |
502-0 SMD 1% 475R |
1 |
0.01 |
0.01 |
|
24. |
Резистор |
502-0 SMD 1% 10K |
12 |
0.01 |
0.12 |
|
25. |
Резистор |
502-0 SMD 1% 121R |
2 |
0.01 |
0.02 |
|
26. |
Резистор |
502-0 SMD 1% 1K |
2 |
0.01 |
0.02 |
|
27. |
Резистор |
502-0 SMD 1% 332R |
1 |
0.01 |
0.01 |
|
28. |
Резистор |
502-0 SMD 1% 1K |
1 |
0.01 |
0.01 |
|
29. |
Резистор |
502-0 SMD 1% 768R |
1 |
0.01 |
0.01 |
|
30. |
Дроссель |
PE-53680 |
1 |
5.08 |
5.08 |
|
31. |
Диод |
SM16LC05C |
1 |
0.08 |
0.08 |
|
32. |
Диод |
КД243Б |
1 |
0.08 |
0.08 |
|
33. |
Стабилитрон |
BZX84C3V3 |
1 |
0.08 |
0.08 |
|
34. |
Кнопка |
TP 12 H9 ABE |
1 |
0.8 |
0.08 |
|
35. |
Соединитель |
РОЗЕТКА Part No 188668-1 AMP Z-PACK 2 mm HM Type A Female Conn. |
1 |
1.2 |
1.2 |
|
36. |
Соединитель |
РОЗЕТКА Part No 352481-1 AMP Z-PACK 2 mm HM Type C Female Conn. |
1 |
1.2 |
1.2 |
|
37. |
Соединитель |
РОЗЕТКА Part No 352481-1 AMP Z-PACK 2 mm HM Type C Female Conn. |
1 |
1.2 |
1.2 |
|
38. |
Соединитель |
DIN 41652 09 66128 7700 |
1 |
5.6 |
5.6 |
|
39. |
Соединитель |
AMP 749265-1 |
1 |
0.7 |
0.7 |
|
40. |
Соединитель |
AMP748390-6 |
1 |
0.7 |
0.7 |
|
41. |
Соединитель |
AMP 215877-7 |
1 |
0.7 |
0.7 |
|
42. |
Соединитель |
AMP 104129-1 |
1 |
0.7 |
0.7 |
|
43. |
Соединитель |
144-11-072-10 |
11 |
0.4 |
4.4 |
|
44. |
Итого: |
472.77 |
Итого суммарная стоимость комплектующих изделий платы КВК при условии 1$=24.7 руб:
Скомпл = 11677,4руб
7.2.3.2. Расчет стоимости вспомогательных материалов
Стоимость вспомогательных материалов (Свсп) определяется по формуле:
Свсп=М (9)
(9)
где М – масса материала в килограммах;
Ркг – расценка-стоимость одного килограмма.
Расчет стоимости вспомогательных материалов для устройства КВК приведен в табл. 7.6.
Таблица 7.6.
Стоимость вспомогательных материалов
|
Материал |
Масса, кг |
Ркг, руб/кг |
Стоимость, руб. |
|
Припой ПОС-61 |
0,07 |
60 |
4,2 |
|
Флюс КЭ2 |
0,015 |
25,2 |
0,378 |
|
Спирт этиловый |
0,030 |
2,4 |
0,072 |
|
Спирто-бензиновая смесь |
0,14 |
3 |
0,42 |
|
Итого |
5,07 |
Итого стоимость вспомогательных материалов Свсп=5,07 руб.
Таким образом суммарные материальных затраты равны
Смат=Свсп+Скомпл, (10)
гдеСвсп – стоимость вспомогательных материалов;
Скомпл – стоимость комплектующих изделий.
Смат=11677,4 + 5,07 = 11682,47 руб.
7.2.3.3. Расчет отчислений на социальные нужды
Отчисления на социальные нужды вычисляются относительно основной и дополнительной заработной платы:
Осц=(ЗПосн+ЗПдоп)
сц/100, (11)
где ЗПосн – основная заработная плата;
ЗПдоп – дополнительная заработная плата;
Нсц – норматив отчислений на социальные нужды 39,5%.
Осц=(34,21 + 5,13) /100=15,74
руб.
7.2.3.4. Расчет цеховых расходов
Цеховые расходы находятся по формуле:
ЦР=(ЗПосн+ЗПдоп) цр/100, (12)
где Нцр – норматив цеховых расходов 120%.
ЦР=(34,21+5,13) /100=47,21
руб.
7.2.3.5. Расчет общезаводских расходов
Общезаводские расходы берутся от суммы основной и дополнительной заработной платы:
ЗР = (ЗПосн+ЗПдоп)
зр/100, (13)
где Нзр – норматив общезаводских расходов 350%.
ЗР = (34,21+5,13) /100=137,69
руб.
7.2.3.6. Расчет заводской себестоимости
Заводская себестоимость определяется как сумма материальных затрат(Смат), основной и дополнительной заработной платы (ЗПосн, ЗПдоп), отчислений на социальные нужды (Осц), цеховых и заводских расходов (ЦР, ЗР):
Сзав=Смат+ЗПосн+ЗПдоп+Осц+ЦР+ЗР.(14)
Сзав = 11682,47 + 34,21 + 5,13 + 15,74 + 47,21 + 137,69= = 11922,45 руб.
7.2.3.7. Расчет полной себестоимости
Полная себестоимость определяется по формуле:
Сп=Сзав /100), (15)
где В – процент внепроизводственных расходов, равный 5%
Сп=11922,45 (1+5/100)=12518,57 руб.
Результаты всех расчетов приведены в табл. 7.7.
Таблица 7.7
Таблица калькуляции
|
Номер Статьи |
Наименование статей калькуляции |
Обозн. |
Сумма, руб. |
|
1 |
Вспомогательные материалы |
Свсп |
5,07 |
|
2 |
Комплектующие изделия |
Скомпл |
11677,4 |
|
Итого материальных затрат |
Смат |
11682,47 |
|
|
3 |
Основная заработная плата рабочего |
ЗПосн |
34,21 |
|
4 |
Дополнительная заработная плата рабочего |
ЗПдоп |
5,13 |
|
5 |
Отчисления на социальные нужды |
Ссц |
15,74 |
|
6 |
Цеховые расходы |
ЦР |
47,21 |
|
7 |
Общезаводские расходы |
ЗР |
137,69 |
|
Итого заводская себестоимость |
Сзав |
11922,45 |
|
|
8 |
Внепроизводственные расходы |
В |
596,12 |
|
Полная себестоимость |
Сп |
12518,57 |
Контроллер встроенных каналов является уникальной разработкой. К тому же, без него невозможно функционирование станции STM-1, поэтому, предприятие, производящее данной изделие будет являться монополистом на местном рынке средств связи- в связи с чем мы можем сами установить цену на КВК в разумных пределах.
7.3. Определение срока окупаемости разработки платы КВК.
Оценка срока окупаемости производится с целью определения периода времени в течении которого после выпуска платы и ее продажи будут полностью возмещены средства, затраченные на разработку изделия, которые составляют К=55167,5 руб.
Если в соответствии с вышеизложенными соображениями назначить цену на КВК в размере 18000 руб., тогда прибыль от продажи одной платы КВК равна величине DС = 5481,43 руб = П.
При оценке эффективности проекта производства комплекта оборудования соизмерение временных показателей осуществляется путем приведения (дисконтирования) их к ценности в начальном периоде. Для приведения разновременных затрат, результатов и эффектов используется норма дисконта (Е), равная приемлемой для инвестора норме дохода на капитал.
Горизонт расчета (Т) измеряется количеством шагов расчета. Шагом расчета при определении эффективности в пределах расчетного времени выбираем один месяц.
Технически приведение к базисному моменту времени затрат, результатов и эффектов, имеющих место на t – ом шаге расчета реализации проекта удобно производить путем их умножения на коэффициент дисконтирования аt определяемый для постоянной нормы дисконта Е как:
аt=1/(1+Е) t, (16)
где t – номер шага расчета (t=0,1..T);
Т – горизонт расчета.
Если же норма дисконта меняется во времени, как это имеет место в нашем случае, то коэффициент дисконтирования равен:
а0=1;
аt=1/Пкt=1(1+Ек), при t>0. (17)
Анализ проекта следует производить с использованием различных показателей, наиболее важными из которых являются:
1) чистый дисконтированный доход (ЧДД) или интегральный эффект;
2) индекс доходности (ИД);
3) срок окупаемости.
ЧДД определяется, как сумма текущих эффектов за весь расчетный период, приведенная к начальному шагу, или как превышение интегральных результатов над интегральными затратами.
При расчете в базовых ценах величина ЧДД для постоянной нормы дисконта вычисляется по формуле:
ЧДД= (Rt – Зt) / (1+Е) t, (18)
(Rt – Зt) / (1+Е) t, (18)
где Rt – результаты достигаемые на t – ом шаге расчета; Зt – затраты осуществляемые на том же шаге;T – горизонт расчета.
Если ЧДД проекта положителен, то данный проект является эффективным (при данной норме дисконта) и может рассматриваться вопрос о его принятии. Чем больше ЧДД, тем проект эффективнее. Если проект будет осуществлен при отрицательном ЧДД, то инвестор понесет убытки, т.е. проект неэффективен.
Для нашего случая удобно воспользоваться модифицированной формулой для определения ЧДД, в которой из состава затрат – Зt исключаются капитальные вложения:
ЧДД=Rt – Зt)/(1+Е)t–К=(ПN(t))/(1+Е)t– К, (19)
где П – прибыль от продажи одной платы КВК;
N(t) – количество плат КВК, проданных в t-ый месяц;
К – капиталовложения, которые для нашего случая являются единовременными затратами связанными с проектированием.
Далее будем исходить из того, что каждый месяц продается N(t)=50 единиц изделий, а норма дисконта Е=0,03.
Вычислим также индекс доходности (ИД), который представляет собой отношение суммы приведенных эффектов к величине капиталовложений:
ИД=(1/К)(ПN(t)) / (1+Е) t (20)
Результаты вычислений по формулам (19), (20) приведены в табл. 7.8.
Таблица 7.8.
Показатели доходности
|
Месяц |
ЧДД, руб |
ИД, руб |
|
1 |
-4146,18 |
- |
|
2 |
-8171,6 |
- |
|
3 |
-12079,77 |
- |
|
4 |
-15874,11 |
- |
|
5 |
-23241,77 |
- |
|
6 |
-30394,84 |
- |
|
7 |
-37339,56 |
- |
|
8 |
-17052,59 |
- |
|
9 |
3950,39 |
- |
|
10 |
24341,65 |
- |
|
11 |
44138,99 |
- |
|
12 |
63359,709 |
1.148 |
По результатам вычислений видно, что единовременные затрыты, связанные с проектированием полностью окупаются в течении первых полутора месяцев после выпуска и продажи станции STM-1, укомплектованной платой КВК, или после 9 месяцев после начала всей разработки.
Таким образом срок окупаемости проекта составляет 9 месяцев.
СПИСОК ЛИТЕРАТУРЫ
1.Быховский И.И. Ускорение развития сети связи России на базе сетей СЦИ. //Электросвязь, 1994 №12 с. 41-43.
2.Горбашко Е.Е. Конкурентоспособность промышленной продукции.:–М, 1992, 254с.
3.Гордон Г.И. Аппаратура СЦИ. // Электросвязь, 1993 №12 с. 7-10.
4.Ким Л.Т. Линейные тракты СЦИ. // Электросвязь, 1991 №6 с. 12-13.
5.Ким Л.Т. Синхронная цифровая иерархия. // Электросвязь, 1991 №3 с. 34-37.
6.Ким Л.Т. Создание транспортной системы на сети связи России. // Электросвязь, 1993 №11 с. 25-28.
7.Охрана труда в радио- и электронной промышленности. /Под ред. Павлова, М.–1984, – 231с.
8.Охрана труда и окружающей среды в радиоэлектронной промышленности. /Ткачук К.Н., Себарно Р.В., Степанов А.Г.: Учеб. пособие – К.: Высшая шк. Головное издательство, 1988. – 248с.
9.РТМ по применению систем и аппаратуры синхронной цифровой иерархии на сети связи РФ. ЦНИИС, Москва, 1994. – 50.
10.Семенов Н.Н., Шмалько А.В.. Терминология Сетей синхронной сетевой иерархии. // Сети и системы связи, 1996, №8, с.58-63.
11.Слепов Н.Н. Аппаратура и функциональные модули сетей SDH. // Сети и системы связи, 1996 №1 с. 19-22.
12.Слепов Н.Н. Интерфейс G.703. // Сети, 1995 №8 с. 24-31.
13.Слепов Н.Н. Обзор аппаратуры SDH. // Сети и системы связи, 1996 №5 с.19-22.
14.Слепов Н.Н. Принципы ПЦИ и СЦИ. // Сети, 1995 №9 с. 22-25.
15.Слепов Н.Н. Синхронные цифровые сети SDH.: – М. 1997, –152с.
16.Тилеке К. Синхронная цифровая иерархия – новый перспективный стандарт передачи информации. // Электросвязь, 1994 №10 с. 17-19.
17. Тилеке К. Шаги на пути создания цифровых телекоммуникационных сетей. //Электросвязь, 1994 №6 с. 26-27.
18. Туровец Е.Л. Экономическое обоснование дипломных проектов. :–Минск, 1995, 128с.
19.ITU-T Recommendation G.702. Digital Hierarchy Bit Rates (1984, 88).
20. ITU-T Recommendation G.703. Physical/Electrical Characteristics off Hierarchical Digital Interfaces (1972, 91).
21. ITU-T Recommendation G.704. Synchronous Frame Structures Used at Primary and Secondary Hierarchical Levels (1984, 88, 90).
22. ITU-T Recommendation G.707. Synchronous Digital Hierarchy Bit Rates (1988, 91, 93).
23. ITU-T Recommendation G.708. Network Node Interface for the Synchronous Digital Hierarchy (1988, 91, 93).
24. ITU-T Recommendation G.709. Synchronous Multiplexing Structure (1988, 91, 93).
25.ITU-T Recommendation G.711. Pulse Code Modulation (PCM) of Voice Frequencies (1972, 93).
26.ITU-T Recommendation G.958. Digital Line Systems Based on the Synchronous Digital Hierarchy (SDH) for Use on Optical Fibre Cables (1994).
27. Sexton M. Transmission networking. Library off Congress Cataloging-in-Publication Data., 1992. – 342p.
Приложение 1.
Программа для ПЛИС
(язык MAX II+)
INCLUDE "lpm_counter";
SUBDESIGNUM01
(
%------------ PIC -----------------%
CLK :INPUT;
%----------PIN MAIN DALLAS ---------%
GALE,GRD,GWR :INPUT;
GPSEN,GCSP :INPUT;
GAD[7..0] :BIDIR;
%----------PIN SLAVE1 DALLAS ---------%
ALE,RD,WR :INPUT;
PSEN,CSP :INPUT;
AD[7..0] :INPUT;
%----------PIN SLAVE2 DALLAS ---------%
MALE,MRD,MWR :INPUT;
MPSEN,MCSP :INPUT;
MAD[7..0] :INPUT;
%---------MITEL--------------%
2MHZ :INPUT;
8KHZ :INPUT;
2MBTXEI :INPUT;
2MBTXWI :INPUT;
2MBTXTRI :INPUT;
%---------NUMBER BOARD--------------%
N[3..0] :INPUT;
%----------PIN MAIN DALLAS ---------%
GA[7..0] :OUTPUT;
GWRF :OUTPUT;
GRDF :OUTPUT;
GCSR :OUTPUT;
%----------PIN SLAVE1 DALLAS ---------%
A[7..0] :OUTPUT;
WRF :OUTPUT;
RDF :OUTPUT;
CSR :OUTPUT;
%----------PIN SLAVE2 DALLAS ---------%
MA[7..0] :OUTPUT;
MWRF :OUTPUT;
MRDF :OUTPUT;
MCSR :OUTPUT;
%----------MITEL-------------------%
GCSM :OUTPUT;
2MBTXEO :OUTPUT;
2MBTXW0 :OUTPUT;
2MBTXTRO :OUTPUT;
DRBUF :OUTPUT;
DS :OUTPUT;
R_W :OUTPUT;
ODE :OUTPUT;
%---------HDLC--------------------%
CSH :OUTPUT;
MCSH :OUTPUT;
CSH1 :OUTPUT;
MCSH1 :OUTPUT;
FCLK :OUTPUT;
%------------ PIC -----------------%
CLKS :OUTPUT;
DE :OUTPUT;
ABSS0 :OUTPUT;
ABSS1 :OUTPUT;
)
%----------NODE----------------------%
VARIABLE
COUNTER: lpm_counter WITH (LPM_WIDTH = 3);
COUNTER_A: lpm_counter WITH (LPM_WIDTH = 5);
GCECONF[1..0] :DFF;
GA[7..0] :DFF;
ODE :DFF;
DE :DFF;
DR_CHN[5..0] :DFF;
DRBUF :DFF;
2MBTXE_I :NODE;
2MBTXW_I :NODE;
2MBTXTR_I :NODE;
A[7..0] :DFF;
SCECONF[1..0] :DFF;
MA[7..0] :DFF;
MCECONF[1..0] :DFF;
FCLK:DFF;
EX3[3..0] :NODE;
ABSS1 :DFF;
%-------------------------------------------------------%
BEGIN
%-------------------------------------------------------%
ABSS0 = GND;
IF GCSP&(GA[7..0]==H"04") THEN
ABSS1.D = GAD[0];
ELSE ABSS1.D = ABSS1.Q;
ENDIF;
ABSS1.CLK = GWR;
%=================== MAIN DALLAS =======================%
GA[7..0].D = GAD[7..0];
GA[7..0].CLK = !GALE;
%------------------- CONFIG CHIP SELECT CONFIGURATION --%
IF GCSP&(GA[7..0]==H"00") THEN
GCECONF[1..0].D = GAD[1..0];
ELSE GCECONF[1..0].D = GCECONF[1..0].Q;
ENDIF;
GCECONF[1..0].CLK = GWR;
GCSR = GCSP # !(GCECONF[1..0]==H"0");
GCSM = GCSP # !(GCECONF[1..0]==H"1");
GWRF = GCSP # !(GCECONF[1..0]==H"2") # GWR;
GRDF = GPSEN & (!(GCECONF[1..0]==H"2") # GRD # GCSP);
%------------------- MITEL MAIN DALLAS -----------------%
R_W = !GWR&GRD;
DS = !(GRD&GWR);
IF GCSP&(GA[7..0]==H"01") THEN
ODE.D = GAD[0];
ELSE ODE.D =ODE;
ENDIF;
ODE.CLK = GWR;
IF GCSP&(GA[7..0]==H"02") THEN
DE.D = GAD[0];
ELSE DE.D = DE;
ENDIF;
DE.CLK = GWR;
%================= SLAVE1 DALLAS ======================%
A[7..0].D = AD[7..0];
A[7..0].CLK = !ALE;
%------------------- CONFIG CHIP SELECT CONFIGURATION --%
IF CSP&(A[7..0]==H"00") THEN
SCECONF[1..0].D = AD[1..0];
ELSE SCECONF[1..0].D = SCECONF[1..0];
ENDIF;
SCECONF[1..0].CLK = WR;
CSR = CSP # !(SCECONF[1..0]==H"0");
CSH = CSP # !(SCECONF[1..0]==H"1");
CSH1 = CSP # !(SCECONF[1..0]==H"2");
WRF = CSP # !(SCECONF[1..0]==H"3") # WR;
RDF = PSEN & (!(SCECONF[1..0]==H"3") # RD # CSP);
%===================== END SLAVE 1 =====================%
MA[7..0].D = MAD[7..0];
MA[7..0].CLK = !MALE;
%------------------- CONFIG CHIP SELECT CONFIGURATION --%
IF MCSP&(MA[7..0]==H"00") THEN
MCECONF[1..0].D = MAD[1..0];
ELSE MCECONF[1..0].D = MCECONF[1..0];
ENDIF;
MCECONF[1..0].CLK = MWR;
MCSR = MCSP # !(MCECONF[1..0]==H"0");
MCSH = MCSP # !(MCECONF[1..0]==H"1");
MCSH1 = MCSP # !(MCECONF[1..0]==H"2");
MWRF = MCSP # !(MCECONF[1..0]==H"3") # MWR;
MRDF = MPSEN & (!(MCECONF[1..0]==H"3") # MRD # MCSP);
%===================== HDLC ============================%
IF (8KHZ == GND) THEN
FCLK.D = VCC;
ELSIF (COUNTER_A.Q[] == H"10")&(COUNTER.Q[] == H"7") THEN
FCLK.D = GND;
ELSE FCLK.D =FCLK;
END IF;
FCLK.CLK = 2MHZ;
%--------------------- PIC ----------------------%
CLKS = CLK;
%------------- SEARCH NUMBER BOARD --------------%
FOR I IN 3 TO 0 GENERATE
EX3[I] = N[I]&GCSP&(GA[7..0]==H"00");
GAD[I]=TRI(EX3[I],!GRD&GCSP);
GAD[I+4]=TRI(EX3[I],!GRD&GCSP);
END GENERATE;
END;