Компьютерные модели автомобилей
| Примечание | единственное и лучшее пособие для изучения программы компьютерного моделирования автомобилей |
| Загрузить архив: | |
| Файл: ref-23486.zip (204kb [zip], Скачиваний: 187) скачать |
Методическое пособие
Составитель: доц Л.А.Молибошко
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ
МИНСК
2003
СОДЕРЖАНИЕ
TOC o "1-3"
ВВЕДЕНИЕ........................................................................................... PAGEREF _Toc32140438 h
1.СОДЕРЖАНИЕДИСЦИПЛИНЫ........................................................ PAGEREF _Toc32140439 h
1.1. Темы лекций и их содержание.................................................. PAGEREF _Toc32140440 h
1.4. Основная литература............................................................... PAGEREF _Toc32140443 h
1.5.Дополнительная литература...................................................... PAGEREF _Toc32140444 h
1.6. Компьютерные программыи другие
научно-методические материалы ............................................. PAGEREF _Toc32140446 h
2. ТЕОРЕТИЧЕСКИЕ ОСНОВЫДИСЦИПЛИНЫ.................................... PAGEREF _Toc32140447 h
2.1. Введение................................................................................ PAGEREF _Toc32140448 h
2.2. Динамические модели............................................................ PAGEREF _Toc32140449 h
2.2.1. Общие сведения........................................................................... PAGEREF _Toc32140450 h
2.2.2. Приведениединамической модели............................................... PAGEREF _Toc32140451 h
2.2.3. Упрощениединамической модели................................................ PAGEREF _Toc32140452 h
2.3. Составление уравнений движения........................................ PAGEREF _Toc32140453 h
2.4.Численноерешение дифференциальныхуравнений.............. PAGEREF _Toc32140455 h
2.5.Метод итераций.................................................................. PAGEREF _Toc32140456 h
2.6. Структурные схемыи графы.............................................. PAGEREF _Toc32140457 h
2.6.1. Структурные схемы..................................................................... PAGEREF _Toc32140458 h
2.6.2. Графы........................................................................................ PAGEREF _Toc32140459 h
2.7. Передаточные функции объектов.......................................... PAGEREF _Toc32140460 h
2.8. Частотныехарактеристики объекта....................................... PAGEREF _Toc32140461 h
2.8.1. Амплитудные частотныехарактеристики..................................... PAGEREF _Toc32140462 h
2.8.2. Собственные колебания и формы................................................. PAGEREF _Toc32140463 h
2.8.3. Собственные частоты.................................................................. PAGEREF _Toc32140464 h
2.9. Вероятностные модели объектов............................................ PAGEREF _Toc32140465 h
2.9.1. Общие сведения о случайных функциях........................................ PAGEREF _Toc32140466 h
2.9.2. Математическая модель дороги.................................................... PAGEREF _Toc32140467 h
ВВЕДЕНИЕ
Дисциплина «Компьютерные модели автомобилей» базируется на общетехничесикх дисциплинах: вычислителньой технике и информатике, высшей математике, теоретической механике. Кроме того, она требует знаний конструкции автомобиля.
Цель дисциплины – научить будущего инженера-механикасамостоятельно составлять расчетные схемы (модели); находить их характеристики и параметры; выводить уравнения движения; использовать численные методы их решення; умению решать с помощью компьютера различные практические задачи, возникающие перед конструктором при конструировании и расчете автомобиля; уметь оценивать и анализировать полученные результаты.
Знания, полученные студентами приизучении дисциплины, используются в дальнейшем при выполнении курсовых работ и проектов, в том числе при выполнении дипломного проекта.
1. СОДЕРЖАНИЕДИСЦИПЛИНЫ
1.1. Темы лекций и их содержание
1.1.1 Введение
Цели и задачи дисциплины. Место дисциплины среди других дисциплин. Роль моделирования в процессе разработки автомобильной техники. Связь между моделированием, техникой безопасности и экологией.
1.1.2. Общие вопросы моделирования
Понятие объекта и его модели. Требования к моделям. Классификация моделей. Математические и компьютерные модели. Структурные и функциональные модели. Микро-, макро- и метамодели. Аналитические, алгоритмические и имитационные модели. Детерминированные и вероятностные модели.
1.1.3.Методы построения моделей
Основные этапы построения модели. Выбор основных свойств объекта. Сбор исходной информации. Разработка структуры модели. Преобразование модели: дискретизация, линеаризация, приведение, упрощение. Оценка адекватности, универсальности, экономичности модели. Методы получения компьютерной модели.
1.1.4.Компьютерные модели на микроуровне
Круг задач, решаемых на микроуровне. Общее квазигармоническое уравнение. Уравнение напряженного состояния деталей. Продольные, крутильные, поперечные колебания стержней и валов. Уравнение Навье-Стокса для изучения аэродинамических качеств автомобиля. Уравнения для расчета теплового состояния деталей. Граничные условия.
Численные методы решения уравнений в частных производных, методы сеток. Этапы решения: дискретизация задачи, алгебраизация, составление системы уравнений. Методы конечных разностей, конечных и граничных элементов. Дискретизация механических систем с распределенными параметрами.
1.1.5.Компьютерные модели на макроуровне
Методы составления обыкновенных дифференциальных уравнений. Использование принципа Даламбера и уравнений Лагранжа II рода. Примеры составления уравнений движения технических объектов. Преобразование дифференциальных уравнений для решения их численными методами на компьютере. Численные методы решения обыкновенных дифференциальных уравнений. Методы Рунге-Кутта, методы прогноза и коррекции.
1.1.6.Структурные схемы и графы объектов
Общие понятия о топологических формулах. Принципы и методы составления структурных схем, использование их в различных областях науки и техники. Примеры составления структурных схем. Графы технических объектов. Направленные и ненаправленныеграфы. Основныя понятия теории направленных графов. Формула Мэзона. Методы составления и преобразования графов. Примеры составления графов.
1.1.7. Передаточные функции технических объектов
Основные понятия о передаточных функциях технических объектов. Нахождение передаточной функции по уравнениям движения, структурным схемам и графам. Передаточные функции механических систем. Запись передаточных функций объекта по геометрическому виду его динамической модели (без составления уравнений движения).
1.1.8. Колебания динамических моделей
Основные понятия теории колебаний Виды колебаний: собственные, вынужденные, резонансные, параметрические, автоколебания. Формы колебаний.
Характеристическое и частотное уравнения динамической модели. Собственные частоты динамической модели. Методы записи частотных уравнений и нахождения собственных частот. Запись уравнения частот объекта методом последовательного расщепления ее динамической модели. Схема алгоритма компьютерной программы для нахождения собственных частот.
1.1.9.Вероятностные модели автомобилей
Общие сведения о вероятностных моделях. Случайные процессы и их характеристики. Понятие об эргодичности и стационарности случайного процесса. Плотность вероятности, математическое ожидание, дисперсия и среднеквадратическое отклонение, корреляционная функция и спектральная плотность случайного процесса.
Случайные возмущения, действующие на автомобиль. Математическая модель дороги. Спектральная плотность дороги и ее характеристики. Нахождение дисперсии ускорений подрессоренной массы при движении автомобиля по неровной дороге.
1.1.10. Компьютерная модель трансмиссии
Динамическая модель трансмиcии, этапы составления модели. Модели двигателя, сцепления, коробки перадач, карданной передачи, ведущего моста, колес, подвески. Динамическая модель трансмиссии.
Определение параметров динамической модели трансмиссии. Приведение параметров к одной базовой координате. Упрощение модели, понятие о парциальных системах и частотах.
Уравнения движения динамической модели трансмиссии. Преобразование уравнений для их расчета на компьютере. Характеристическое и частотное уравнения динамической модели трансмисии. Компьютерная модель автомобиля.
1.1.11. Компьютерная модельподвески
Динамическая модель подвески. Определение параметров динамической модели подвески. Уравнения движения динамической модели подвески. Преобразование уравнений для их расчета на компьютере. Характеристическое и частотное уравнения динамической модели подвески. Компьютерная модель подвески.
1.4. Основная литература
1. Тарасик В.П. Математическое моделирование технических систем.: Учебник для ВУЗов.- Мн.:ДизайнПРО,1997. – 640 с.
2. САПР. Кн.1. Принципы построения и структура. / Норенков И.П.- Мн.: Выш. школа, 1987. – 123 с.
3. САПР. Кн.4. Математические моделитехнических объектов. / В.А.Трудоношин, Н.В.Пивоварова - Мн.: Выш. шк., 1988. – 159 с.
4. Применение ЭВМ при конструировании и расчете автомобиля. / А.И. Гришкевич, Л.А. Молибошко, О.С. Руктешель, В.М. Беляев / Под общ. ред. А.И. Гришкевича. – Мн.: Выш..шк., 1978. – 264 с.
5. Молибошко Л.А., Гришкевич А.И., Руктешель О.С. Динамические расчеты транспортных машин. - Мн.: БПИ, 1977.- 68с.
6. Гришкевич А.И. Автомобили: Теория. – Мн.: Выш. шк.,1986.– 208 с.
7. Автомобили. Конструкция, конструирование и расчет. Трансмиссия. / Под ред. А.И. Гришкевича. - Мн.: Выш. шк., 1985. – 240 с.
8. Автомобили. Конструкция, конструирование и расчет. Системы управления и ходовая часть./ Под ред. А.И. Гришкевича. - Мн.: Выш. шк., 1987. – 200 с.
7. Молибошко Л.А. Исследование динамических систем с помощью передаточных функций. Инженер-механик, № 2, 2001.
1.5.Дополнительная литература
1. Самарский А.А. Введение в численные методы. - М.: Наука, 1987.–288 с.
2. Бахвалов Н.С. и др. Численные методы. - Наука, 1987. – 600 с.
3. Зенкевич О., Морган К. Конечные элементы и аппроксимация.–М.: Мир,1986. – 318с.
4. Бидерман В.Л. Теория механических колебаний. – М.: Высш. школа, 1980. - 408 с.
5. Силаев А.А. Статистическая теория подрессоривания транспортных машин. – М.: Машиностроение, 1972. – 192 с.
6. Фурунжиев Р.И.и др. Применение математических методов и ЭВМ: практикум. - Мн.: Выш. шк., 1988. – 191 с.
1.6. Компьютерныепрограммыи другие
научно-методические материалы
1. Комплекс программ, обеспечивающих решение задач в соответствии с примерным перечнем лабораторных и практических занятий.
2. Проектирование автомобиля (алгоритмы и программы). Часть2. Конструирование и расчет автомобиля. Методические указания для студентов специальности "Автомобиле-итракторостроение"/ О.С. Руктешель, Л.А. Молибошко, В.А., Сергеенко и др. - Минск: БГПА,1992.
3. Проектирование автомобиля (алгоритмы и программы). Часть3. Математические модели в расчетах на ЭВМ. Основы САПР автомобиля.Методические указания для студентов специальности "Автомобиле- и тракторостроение" /О.С. Руктешель, Л.А. Молибошко, А.М. Сапелкин и др. - Минск: БГПА, 1993.
2. ТЕОРЕТИЧЕСКИЕ ОСНОВЫДИСЦИПЛИНЫ
2.1. Введение
Модель – это некоторое средство, с помощью которого собирается полезная информация о реальном объекте. Таким образом, модель должна содержать (отображать) изучаемые свойства объекта. Моделирование – исследование объекта с помощью модели. В зависимости от вида различают физические, математические, компьютерные модели. иногда к ним добавляют мысленные и документальные модели.
Математическая модель – это совокупность математических объектов (матриц, уравнений, чисел, переменных и т.д.) и соотношений между ними, отражающих требуемые свойства моделируемого объекта. Компьютерная модель - это математическое описание моделируемого объекта, находящееся в компьютере. Иначе, это программный продукт, состоящий из одного или нескольких файлов.
Компьютерная модель должна соответствоватьряду тебований: универсальности, адекватности, точности, экономичности. Адекватность характеризует полноту отображаемых в модели свойств реального объекта. Точность оценивается степенью совпадения значений параметров реального объекта и значений тех же параметров, рассчитанных с помощью модели. Адектватность характеризует способность модели отображать заданные свойства с точностью не ниже заданной. Экономичность модели оценивается затратой вычислительных ресурсов на ее реализацию.
Модели разделяют по следующим классификационным признакам:
· по типу отображаемых свойств объекта – структурные, функциональные;
· по принадлежности к иерархическому уровню – на модели на микро-, макро- и метауровне;
· по форме представления свойств объекта – на графические, аналитические, алгоритмические, имитационные;
· по способу определения параметров – на теоретические, эмпирические, комбинированные;
· по характеру изменения параметров и свойств обекта – на детерминированные и вероятностные.
2.2. Динамическиемодели
2.2.1. Общие сведения
Динамические модели автомобилей состоят из отдельных элементов: инерционных, упругих, диссипативных, редукторных.
Инерционное звено обладает только инерционными свойствами.Абсолютно инерционных звеньев на самом делене существует. Все реальные звенья кроме инерционных, обладают еще упругими и диссипативными свойствами. При расчетах автомобиля инерционными звеньями считают маховик двигателя, массу автомобиля.
Инерционное звено аккумулирует кинетическую энергию. Инерционность оценивается при прямолинейном движении - массой m (кг), а при угловом - моментом инерции J (кг×м2).
Условные обозначения инерционных звеньев: прямоугольник для моделей с поступательным перемещением масс и окружность – с угловым перемещением.
Упругое звено имеет только упругие свойства. К таким звеньям можно придти, когда инерционные и диссипативные качества звена незначительные. Упругие звенья аккумулируют потенциальную энергию. Примерами таких звеньев являются полуоси, пружины, торсионы, валы.
Упругие качества оцениваются жесткостью с, под которой понимают отношение изменения силы (момента), приложенной к звену, к его деформации. Часто используют обратную величину - податливость е = 1/с.
Условные обозначения упругих звеньев динамических моделей - прямые или ломаные линии (пружины) .
Диссипативные звенья рассеивают энергию.Чисто диссипативных звеньев не существует. К ним можно отнести амортизаторы автомобиля. Оцениваются коэффициентом демпфирования b, под которым подразумевают отношение силы (момента) к скорости его деформации.
Параметры звеньев находят теоретическими или экспериментальными методами.Для простейших деталей формулы для расчета моментов инерции и жесткостей приводятся в соответствующей литературе.
Редукторные звенья изменяют скорость перемещения масс системы. Характеризуются передаточным отношением. Примерами таких звеньев являются коробка передач, дополнительная передача, главная передача и т. д.
2.2.2. Приведение динамическоймодели
Приведенная модель не имеет редукторных звеньев и потому все инерционные звенья перемещаются в установившемся режиме с одной скоростью. Параметры системы обычно приводятся к одной базовой координате. При этом энергии звеньев до и после приведения должны остаться неизменными.
Соответствующие формулы для выполнения приведения:
mп = mс/u2 иJп = Jс/u2 - для инерционных звеньев;
сп = сс/u2,еп = ес×u2 - для упругих звеньев;
bп = bс/u2 - для диссипативных звеньев,
где u - передаточное отношение редукторных звеньев, размещенных между базовой координатой и координатой, соответствующей приводимому звену.
Нижний индекс "п" соответствует приведенному звену, а "с" - неприведенному.
Пример выполнения приведения показан на рис. 1.
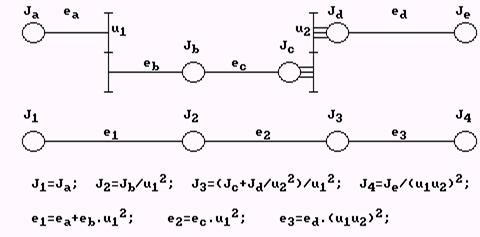
Рис.1. Приведение параметров динамической модели кмассе Jа.
2.2.3. Упрощение динамическоймодели
Упрощение выполняется с цельюускорения и облегчения выполнения расчетов при практической неизменной точности.
Из теории колебаний известно, что собственные частоты объекта, большие чем в 4 раза за анализируемый частотный диапазон, практически не оказывают влияния на точность выполнения расчетов. Этот постулат является основой для выполнения упрощения.
Наибольшее распространение имеет метод парциальных систем, который включает следующие этапы:
1. Модель разбивается на парциальные системы двух типов (рис.2).
2. Рассчитываются квадраты собственных (парциальных) частот этих систем pi2и q i2(рис. 3).
Находится парциальная система с максимальнойчастотой рmaxили q max.
4. Найденная парциальная система преобразовывается в эквивалентную парциальную систему другого типа (рис. 4).
5. Преобразованная система встраивается в упрощаемую динамическую модель вместо системы с р max или qmax .
6. Однотипные параметры модели суммируются, в результате чего получается упрощенная модель с меньшей на 1 количеством масс.
7. Выполняется проверка возможности дальнейшего упрощения модели и при положительном результате процесс повторяется.
Парциальная система получается из динамической модели, если принять во внимание только одну координату, а остальные приравнять к нулю. Если обобщеннымикоординатами являются моменты в упругих звеньях или их деформации, то получаются парциальные системы первого типа; если углы поворота масс - парциальные системы второго типа.
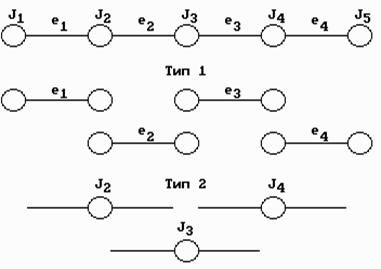 |
Рис. 2. Разбивка динамической модели на парциальные
системыдвух типов
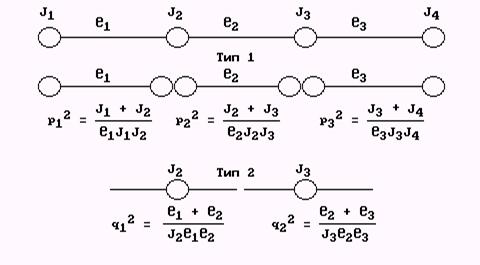
Рис. 3. Значения квадратов собственных (парциальных) частот
парциальных систем двух типов

Рис. 4. Преобразованиепарциальной системы одного типа
в парциальную систему второго типа.
2.3. Составлениеуравненийдвижения
Существуют разные методы. Наиболее распространенные - принцип Даламбера и уравнения Лагранжа второго рода.
Принцип Даламбера основан на сведении задач динамики к задачам статики путем приложения к массам сил инерции. Уравнения движениязаписываются непосредственно как сумма активных сил, реакций и сил инерции, действующих вдоль рассматриваемой координате.
Уравнения Лагранжа обычно записывают в виде
 ,
,
где Eк, EП и Ф - энергии системы: кинетическая, потенциальная и функция рассеивания Ф; Qi - внешняя сила, действующая вдоль координаты qi. Нужно иметь в виду, что Ек, записанная в декартовых координатах, является функцией только скоростей и не зависит от координатыqi. Однако,записанная в обобщенных координатах,Ек может быть функцией qi и qi'.
Внешняя сила Qi при необходимости находится как
производнаявиртуальной работы W по qi:
Полная кинетическая энергия .
.
Потенциальная энергия (понимается как приращение при перемещении масс)
 ,
,
где ci, cjj - жесткости линейные и угловые упругих звеньев;
Di, ej - линейные и угловые деформации.
Функция рассеивания
 где Fi - сила трения.
где Fi - сила трения.
Если Fi =
biqi 'иbi = const,то 
Для силы постоянного трения F = Fо sqn (qi‘)и 
Пример 1.Используя принцип Даламбера, записать уравнения движения для трехмассовой динамической модели (рис. 5).
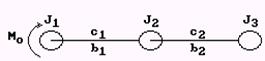
Рис. 5. Трехмассовая динамическая модель
Решение.Суммируя крутящие моменты, действующие вдоль обобщенных координат j1, j2 и j3,получим:
J1j1”+M1=M0;
J2j2”-M1+M2=0;
J3j3”-M2=0,
где M1 = Mb1+Mc1 = b1( ) + c1(j1-j2);
) + c1(j1-j2);
M2 = Mb2+Mc2 = b2( ) +c2(j2-j3).
) +c2(j2-j3).
После простых преобразований получаем систему уравнений относительно углов поворота масс ji:
(J1j1”+ b1 + c1j1) – (b1
+ c1j1) – (b1 + c1j2) = M0;
+ c1j2) = M0;
[J2j2”+(b1+b2)1+c2)j2] – (b11j1) – (b2 2j3) = 0;
2j3) = 0;
(J3j3”+
b2+ c2j3) – (b2+ c2j2) = 0.
Пример 2. Используя уравнения Лагранжа II рода, вывести уравнения движения для подвески автомобиля (рис. 6).
Решение. Кинетическая энергия системы
Eк
= 0,5(mz’2 +Jj’2
+m1 ) .
) .
Приняв за начало координат положение статического равновесия, получим для потенциальной энергии
Еп = 0,5(ср1
где Di– деформации упругих элементов (рессор и шин):
Dр1 = x1 – z1; Dр1 = x1 – z1; Dш1 = q1 - x1; Dш2 = q2 - x2.
Перемещения z1 и z2 подрессоренной массы m над балками переднего и заднего мостов соответственно равны:z1 = z + ajи z2 = z - bj.

Рис. 6. Трехмассовая динамическая модель подвески автомобиля
С учетом сказанного выражение для потенциальной энергии принимает вид:
Еп = 0,5[ср1(x1-z-aj)2+ср2(x1-z+bj)2+сш1(q1-x1)2+сш2(q2-x2)2].
Энергия, рассеиваемая в системе:
Ф = 0,5(kр1
После дифференцирования энергий и подстановки полученных производных в уравнения Лагранжа, число которых равно числу обобщенных координат, получаем искомую систему уравнений.
2.4.Численноерешениедифференциальныхуравнений
Численными методами решается уравнение первого порядка в виде: y' = f(x,y) с заданными начальными условиями x0, y0, где x и y -независимая (обычно время) и зависимая переменные. В дальнейшем будем считать такое уравнение записанным в стандартном виде.
Уравнения высших порядков приводят к системе уравнений первого порядка введением дополнительных переменных. Например, для уравнения второго порядка
y" = f(x,y',y)
примем v= y'. Тогда y" = v' иимеем систему уравнений:
v’ = f(x, y, v);
y’ = v.
Графическая интерпретация численного решения обыкновенного дифференциального уравнения показана на рис. 7 на примере простейшего метода Эйлера. Известной является функция y0 в точке x0.

Рис. 7. Графическая интерпретация метода Эйлера
Решение находится для ряда значений независимой переменной х с шагом h:
x1 = x0 + h ; x2 = x1 + h ; ... xn+1 = xn + h .
Значение y1 (рис. 7) находится на пересечении прямой, проведенной из точки (х0,у0) под углом a0 = arctg(y0') и перпендикуляра, проведенного к оси абсцисс из точки х1. Процесс последовательно повторяется для других значений х:
y1 =y0 + h×y0' =y0 + h×f(x0,y0) ,
y2 =y1 + h×y1' = y1 + h×f(x1,y1), ...
yn+1 = yn + h×yn' = yn + h×f(xn,yn) .
Недостатком данного метода являетсянизкая точность решения. Для повышения точности решения уменьшают шаг счета h или используют методы более высокого порядка. Под порядком метода понимается максимальный порядок производнойряда Тейлора, учитываемый в численном методе
yn+1 = yn + h·yn' +h2/2·y” +h3/6·y(3) +...
Метод Эйлера учитывает производную только первого порядка, поэтому является методом первого порядка. Чаще всего используется метод Рунге-Кутта четвертого порядка, алгоритм которого имеет вид:
yn+1 = yn + (k1 + 2×k2 +2×k3 + k4) / 6 ,
где k1 = h×f(xn,yn) ;
k2 = h×f(xn + 0.5×h,yn + 0.5×k1) ;
k3 = h×f(xn + 0.5×h,yn + 0.5×k2) ;
k4 = h×f(xn + h,yn + k3) .
Начало программы (вариант) для решения дифференциального уравнения второго порядка
m×x" + b×x' + c×x = F
показано ниже.
Program DIFUR;
Uses Crt,Dos,Lib,Graph;
typemas = array[1..10] of real;
Var Rez :text; d,y,y1 :mas;
Filerez,text,Sxmax,Sxst,Stmax :string[50];
m,b,c,F,h,hp,t,tp,tmax,xmax,xst,nx,ny,nmax :real;
n :integer;
KL,nd,j :byte;
Procedure Prav(var y,d:mas);
íy[1] = x' - скорость массы d[1] = x''-ускорение массы ý
íy[2] = x - перемещение массы d[2] = x' -скорость массы ý
begin
d[1] := (F - b*y[1] - c*y[2])/m;d[2] := y[1];
end;
Procedure Rynge;
Var j :byte; yy,k :array[1..nd] of real;
begin
Prav(y,d);
For j:=1 to nd do begin
yy[j]:=y[j]; k[j]:=h*d[j]; y1[j]:=yy[j] + 0.5*k[j]; y[j]:=y[j] + k[j]/6; end;
t:=t+0.5*h; Prav(y1,d);
For j:=1 to nd do begin
k[j]:=h*d[j]; y1[j]:=yy[j] + 0.5*k[j];y[j]:=y[j] + k[j]/3; end;
Prav(y1,d);
For j:=1 to nd dobegin
k[j]:=h*d[j]; y1[j]:=yy[j] + k[j]; y[j]:=y[j] + k[j]/3; end;
t:=t+0.5*h; Prav(y1,d);
For j:=1 to nd do begin k[j]:=h*d[j]; y[j]:=y[j] + k[j]/6; end;
end;
Procedure Start; ...
Процедура Prav (var y,d:max) предназначена для вычисления правых частей уравнений. Использованные в ней массивы типа mas: y – вектор - решение (выходные параметры); d - производные вектор - решения (производныевыходных параметров).
Процедура Rynge реализует метод Рунге-Кутта четвертого порядка.
2.5.Метод итераций
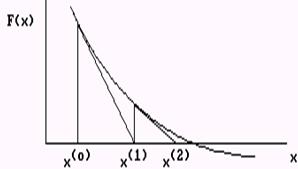
Метод итераций (метод последовательных приближений) предназначен для нахождения корней алгебраических и трансцендентных уравнений. Для этого исходное уравнение F(x) = 0 нужно преобразовать в эквивалентное x = f(x), например, добавлением в левую и правую части исходного уравнения F(x) = 0 переменной х.
Сначала задаются первоначальным значением x = x(0) и находят первое приближение:
x(1) = f[x(0)] .
Аналогично находят следующиеприближения:
x(2) = f[x(1)], ..., x(i+1) = f[x(i)] .
Расчетзавершается, если достигается заданная точность е
|x(i+1) – x(i)| < е.
Процеcс сходящийся, если ú df/dxú < 1.
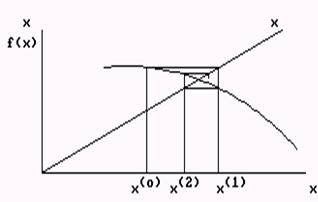
Графическая интерпретация метода итераций показана на рис. 8 а. Точное решение соответствует пересечению функции f(x) с осью абсцисс х.
Для уравнений типа
F(x) = a0×xn + a 1×xn-1 + ... + an = 0
удобным в использовании является метод Ньютона (метод касательных), итерационная формула для которого имеет вид:
 где F’(x) =
dF/dx (рис.8 б).
где F’(x) =
dF/dx (рис.8 б).
 |
 |
||
а) б)
Рис. 8. Графическая интерпретация методовитераций (а) и Ньютона (б)
2.6. Структурныесхемыи графы
Представляют собой графическую запись уравнений и наглядно показывают связи между отдельными элементами объекта. Структурные схемы и графы можно по определенным правилам преобразовывать и упрощать. Такие действия эквивалентны алгебраическим преобразованиям систем уравнений. Они имеют геометрическую интерпретацию и уменьшают вероятность появления ошибок. По структурным схемам и графам записываются топологические формулы, которые впервые предложены Кирхгофом (1874 г.) и Максвеллом (1892 г.).
Структурные схемы и графы можно составлять по уравнениям и по геометрическому виду объекта. В последнем случае объект рассматривается состоящим из отдельных элементов, для каждого из которых имеются частные структурные схемы и графы.
2.6.1. Структурные схемы
В структурных схемах математические операции изображаются прямоугольником, внутри которого указывается вид операции (рис. 9).
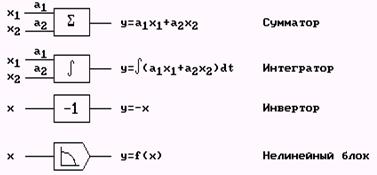
Рис. 9. Примеры условных обозначений математических
операций на структурных схемах
В соответствии с рис. 9 один из вариантов структурнойсхемы для дифференциального уравнения
y” + a1y’ + a2y = F
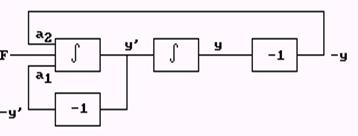 |
будет иметь следующий вид (рис.10):
Рис. 10. Структурная схема дифференциального уравнения
второго порядка (вариант)
2.6.2. Графы
Теория направленных графов получила основное развитие за рубежом. Разработано несколько типов графов, с помошью которых решаются системы линейных алгебраических уравнений. Наиболее известен М-граф, предложенный Мэзоном в 1956 г. Он представляет собой графическую трактовку известного в математике правила Крамера. Мэзон показал, что определитель системы имеет вполне определенный физический смысл и разработал упорядоченную методику его нахождения.
При использовании графов исходные уравнения заменяются графом. Затем по его виду записывается решение в виде передаточной функции (см. ниже). Граф, как и структурная схема строится по определенным правилам. Его вид зависит от геометрии объекта и принятых выходных координат.
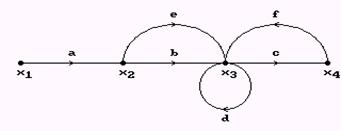 |
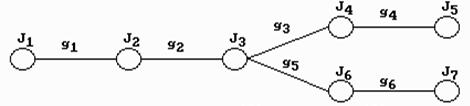
Графом называют геометрическую фигуру, образованную точками и соединяющими их линиями (рис. 11).
Рис. 11. Пример графа объекта
Точки х1, х2, х3 и х4 называют вершинами или узлами графа. Они соответствуют принятым входным и выходным координатам. Линии a, b, c, …fназывают ветвями или ребрами графа. Они определяют связи и соотношения между координатами графа.
Направления передачи сигналов указывают стрелками. Ветви графа образуют пути прохождения сигналов. Различают прямые и обратные, замкнутые и разомкнутыепути. В замкнутом пути (на рис.12 путь f-a) сигнал возвращается к исходному узлу. Он образует контур обратной связи, частным случаем которого является петля (путь d).
Правила упрощения и преобразования графов.
Правило 1. Устранение узла. x2=ax1; x3=bx2=abx1

Правило 2. Объединение ветвей. х2=аx1+bx1=(a+b)x1

Правило 3. Устранение простой узловой точки.
x4=ax1; x2=bx4; x3=ax4; x2=abx1; x3=acx1
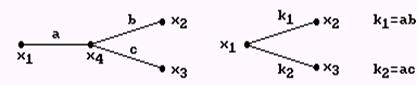
Правило 4. Устранение контура обратной связи на пути прохождения сигнала.
x2=ax1+cx3; x3=bx2; x3=abx1+bcx
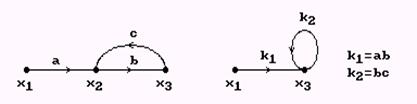
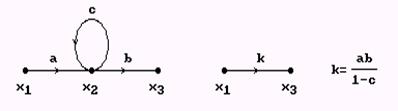
Правило 5. Исключение петли.
x2=ax1+cx2; x2=a/(1-c)x1; x3=bx2; x3=ab/(1-c)x1
Пример. Построить граф для трехмассовой динамической модели (рис. 12)
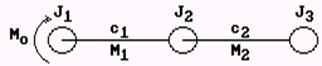
Рис.12. Трехмассовая динамическая модель
Примем в качестве выходных координат скорости масс и моменты в упругих звеньях. Уравнения движения для рассматриваемой модели
J1j1”+M1=M0;
J2j2”-M1+M2=0;
J3j3”-M2=0,
где M1=c1(j1-j2); M2=c2(j2-j3).
Запишем их в виде
j1’= 1/(J1s)M0 – 1/(J1s)M1;
j2’= 1/(J2s)M1 – 1/(J2s)M2;
j3’= 1(J3s)M2,
где 1/s – символ интегрирования. Соответствующий граф показан на рис. 13.
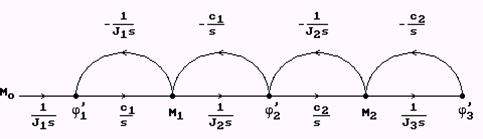
Рис.13. Вариант графа трехмассовой динамической модели
2.7. Передаточныефункцииобъектов
Нахождение передаточной функции в общем случае сводится к составлению уравнений движения, записи их в преобразованиях Лапласа и решении относительно изображений обобщенных координат – выходной и входной. Под передаточной функцией понимают отношение изображения выходной координаты к изображению входной координаты при нулевых начальных условиях. Рассмотрим сказанное на простом примере. Пусть поведение объекта описывается дифференциальным уравнением
a0y”+a1y’+a2y=b0x’+b1x,
где y и x – соответственно выходная и входная координаты.
Преобразованное по Лапласу дифференциальное уравнение имеет вид:
(a0s2+a1s+a2)y(s)=(b0 s+b1)x(s).
Отсюда передаточная функция равна W(s)=
Для системы уравнений используют правило Крамера.
Пример. Для трехмассовой динамической модели (рис. 12)
найти передаточные функции W1(s)=  и W2(s)= между моментами М1 и М2
в упругих звеньях и входным моментом М0.
и W2(s)= между моментами М1 и М2
в упругих звеньях и входным моментом М0.
Решение. Приняв в качестве обобщенных координат моменты в упругих звеньях, получим следующие уравнения движения:

После преобразования по Лапласу получим
(s2+l1)M1(s) -  2(s) =
2(s) =  0(s);
0(s);
(s2+l2)M2(s) -  1(s) = 0.
1(s) = 0.
Отсюда искомые передаточные функции
W1(s) = = 
 W2(s) = =
W2(s) = =

где R=R1R2- g12; R1= s2+l1; R2= s2+l2;
g12=c1c2/J22; l1=c1(1/J1+1/J2); l2=c2(1/J2+1/J3);
Анализ передаточных функций показывает, что их можно записывать непосредственно по виду динамической модели без составления уравнений движения.
Структура передаточной функции динамической модели имеет следующий вид:
W(s) = K·B / C.
ПеременнаяK учитывает параметры модели, расположенные на пути прохождения сигнала от входной до выходной координат. Переменная В соответствует характеристическому определителю части динамической системы (подсистемы), расположенной вне пути прохождения сигнала. Переменная С соответствует характеристическому определителю части динамической модели, расположенной на пути прохождения входного сигнала. Если за входной сигнал принято внешнее воздействие. то С соответствует характеристическому определителю всей системы.
При анализе пути прохождения сигнала массы, расположенные на пути его прохождения, считаются закрепленными, а упругие звенья – разорванными, что равноценно приравниванию нулю соответствующих координат. Если имеется несколько путей прохождения сигнала, то передаточная функция равна сумме передаточных функций, определяемых отдельно для каждого пути.
 |
Ниже приведены примеры некоторых передаточных функций между моментами Mi и углами поворота масс jiдля динамических моделей, показанных на рис. 14. Упруго-диссипативнаяхарактеристика gi=bis+ciучитывает диссипативные (коэффициент bi) и упругие (коэффициент сi) свойства i-го звена.
а)
б)
 |
в)
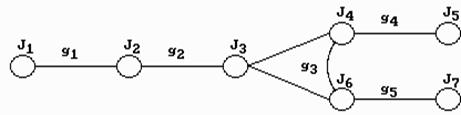 |
Рис. 14. Динамические модели различных типов
Неразветвленная динамическая модель (рис 14 а).
 =
= 


 =
= 


 =
= 






Разветвленная динамическая модель (рис 14 б).
W02(s) = 
 W03(s) =
W03(s) = 


Динамическая модель с дифференциальным разветвлением (рис. 14 в).
W02(s) =  W03(s) =
W03(s) = 
W04(s) = 
2.8. Частотныехарактеристикиобъекта
Частотные характеристики оценивают свойства объекта при воздействии на него гармонических возмущений. В дальнейшемограничимся рассмотрением только амплитудных частотных характеристик (АЧХ) и собственных частот объектов. Частотные характеристики самым тесным образом связаны с передаточными функциями. Для получения частотных характеристик достаточно в передаточной функции W(s) заменить sна jw. В результате получается комплексная частотная характеристика (КЧХ) W(jw). Все остальные характеристики являются ее частными случаями.
2.8.1.Амплитудные частотныехарактеристики
Амплитудная частотная характеристика представляет собой отношение амплитуды выходного установившегося сигнала к амплитуде входного гармонического воздействия различной частоты.
АЧХ можно найти из КЧХ, разложив последнюю на вещественную ReW и мнимую ImW части:
W(jw) = ReW + jImW, где j = 
Тогда АЧХ будет равна
A(w) =  .
.
Пример. Найти АЧХ для объекта, поведение которого описывается уравнением
a0y”+a1y’+a2y=bx,
Решение. Передаточная функция равна
W(s)=
После замены sна jwполучаем
W(jw)
= 
Разделив последнее выражение на вещественную и мнимую части, после простых преобразований находим АЧХ
A(w)
= 
Более просто АЧХ находится при использовании выражения
A(w) =  .
.
Типичный график АЧХ показан на рис. 15.
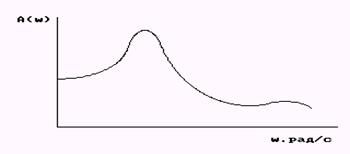
Рис. 15. Пример графика амплитудной частотной характеристики объекта.
Точки максимумов АЧХ соответствуют резонансным частотам объекта. При уменьшении трения в системе эти максимумы увеличиваются, стремясь к бесконечности при уменьшении трения до нуля.
2.8.2.Собственные колебания и формы
Собственными называют периодические колебания консервативной системы, совершающиеся исключительно под воздействием инерционных и упругих сил. Для возбуждения таких колебаний достаточно приложить к системе какое-нибудь начальное возмущение, т. е. вывести ее из состояния равновесия. После прекращения действия возмущения в системе устанавливаются собственные колебания. Углы поворота масс описываются уравнением (например, рис.14 а)
ji = åAij sin(wjt + aj),
где i– номер массы , j – порядковый номер собственной частоты,aj – фазовый угол, Aij – амплитуда колебаний i – ой массы на j – ой собственной частоте.
Из формулы следует, что в общем случае все массы системы совершают сложное колебательное движение, называемое полигармоническим. Можно выбрать такие начальные возмущения, при которых все массы будут совершать гармонические колебания с некоторой одной частотой wj, но с разными амплитудами. Эти колебания называют главными или нормальными колебаниями:
jij = Aijsin(wjt + aj).
Одинаковый фазовый угол ajозначает, что массы системы одновременно проходят через положение равновесия и одновременно достигают максимальных значений. Совокупность амплитуд называют формой колебаний. У каждой собственной частоты имеется своя форма колебаний, называемая главной. Число форм колебаний равно числу собственных частот системы. В теории колебаний доказывается, что энергия одной формы колебаний не может переходить в энергию колебаний другой формы.
Линия, соединяющая концы амплитуд, называется упругой линией (рис. 16). Ее пересечение с осью абсцисс представляет собой узел колебаний. Число узлов равно номеру собственной частоты. В узле колебаний сечение вала не перемещается. Тангенс угла наклона упругой линии пропорционален моменту в упругом звене.
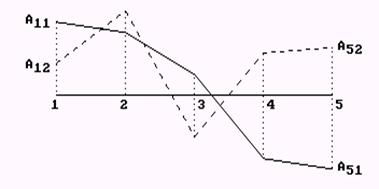
Рис. 16. Формы колебаний пятимассовой динамической модели (рис. 12 а):
¾¾ первая форма;------ вторая форма
2.8.3. Собственные частоты
Для нахождения собственных частот Wi нужно в каком-либо виде записать частотное уравнение R(w) как функцию инерционных и упругих параметров модели. Корни этого уравнения являются собственными частотами колебаний. Собственные частоты нумеруют в порядке возрастания, начиная с W1,
График изменения R(w) показан рис 17. Точки пересечения R(w) с осью абсцисс соответствуютсобственным частотам. Критерием нахождения собственной частоты в интервале wi ... wi+1 является знак произведения
z = R(wi)×R(wi+1) £0 ,
который должен быть отрицательным или равным нулю.
Используя линейнуюинтерполяцию, находим j-ю собственнуючастоту модели:
 , где h – шаг расчета.
, где h – шаг расчета.
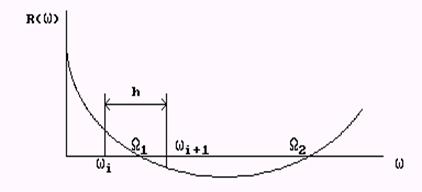
Рис. 17.График изменения частотной функции R(v).
Число собственных частот, отличных от нуля, равно числу упругих звеньев модели. Таким образом, для нахождения собственных частот сначала надо записать частотное уравнение и, увеличивая w от wmin (обычно wmin = 0), найти нужное количество пересечений функции R(w) с частотной осью w.
Для записи частотного уравнения используют разные методы.
В общем видедля рассчитываемой консервативной модели составляются уравнения движения, которые затем записываютсяв преобразованиях Лапласа. Полученную систему алгебраических уравнений записывают в систематизированном виде и составляют характеристическийопределитель. Затем его преобразовывают в частотный определитель R(w) заменой оператора s на jw (или s2 на –w2). Таким образом, получают частотное уравнение в виде определителя. Например, для модели с четырьмя парциальными системами:
где Ri = li - wi, i = 1,4 - частотные уравнения парциальных систем;
li- квадраты собственных частот парциальных систем;
ri,i+1 - коэффициенты связи одной парциальной системы с другой.
Описанный выше метод нахождения частотного уравнения известен в литературе как матричный метод.
Частотное уравнение динамической модели достаточно просто записывается с помощью последовательного расщепления на отдельные части (подсистемы). Такой метод известен как метод последовательного расщепления. Он является логическим развитием матричного метода.
Система сначала делится на две подсистемы с повторением
какой-нибудь массы Jк. Частотное уравнение всей системы равно
произведению частотных уравненийэтих
подсистем минус произведение коэффициента связи gк-1,к между ними, умноженное
на частотные уравнения подсистем, которые получаются из исходной, если
отбросить массу Jк и разорвать упругие звенья cк-1 и cк.
Аналогичным методом выполняется дальнейшее расщепление системы. Если
расщепление выполняетсяна массе,
которая связана с несколькими упругими звеньями, то необходимо учитывать все
возможные пути прохождения сигналов из одной подсистемы в другую.
между ними, умноженное
на частотные уравнения подсистем, которые получаются из исходной, если
отбросить массу Jк и разорвать упругие звенья cк-1 и cк.
Аналогичным методом выполняется дальнейшее расщепление системы. Если
расщепление выполняетсяна массе,
которая связана с несколькими упругими звеньями, то необходимо учитывать все
возможные пути прохождения сигналов из одной подсистемы в другую.
На рис. 18 процесс последовательного расщепления показан на примере 5-массовой динамической модели.
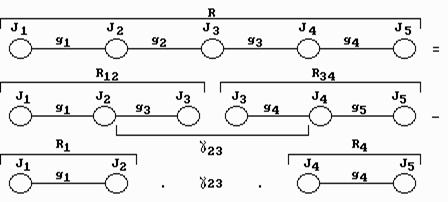
Рис.18. Графическая интерпретация последовательного расщепления
динамической модели
В качестве примера на рис. 19 приведены частотные уравнения динамических моделей, показанных на рис. 14. Нижние индексы соответствуют номерам упругих звеньев, верхние - номерам неподвижно закрепленных масс.
После несложных преобразований частотное уравнение можно записать в виде алгебраического полинома:

гдеx = w2 ; n - количество упругих звеньев.
В соответствии с формулами Виета, устанавливающими связь между коэффициентами уравнения и его корнями
a1 = x1 + x2 + ... + xn; a2 = x 1x2 + x 1x3 + ... + x n-1xn; ..... an=x 1x 2x3...xn .
а)
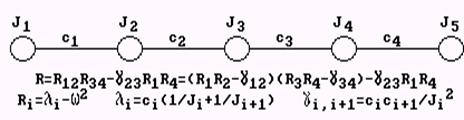
б)
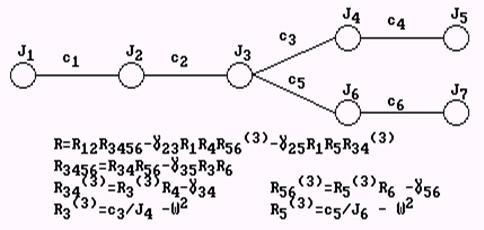
в)
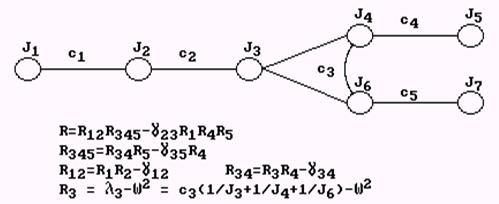
Рис. 19. Частотные уравнения динамических моделейразличных типов
2.9. Вероятностные модели объектов
К вероятностным моделям приходят, если структура, параметры объекта или действующие на него возмущения являются случайными функциями. Вероятностные расчеты базируются на дисциплинах: теория вероятностей и математическая статистика, теория случайных функций, статистическая динамика.
2.9.1. Общие сведения о случайных функциях
Функция, значение которой является случайной величиной при каждом данном значении независимой переменной, называется случайной. Она может рассматриваться как бесконечная последовательностьслучайных величин и зависит от одной или нескольких независимо изменяющихся переменных.Случайные функции, для которых независимой переменной является время, называют стохастическими. В дальнейшем, если особо не оговорено, в качестве независимой переменной принято время t.
Функция, получаемая в результате каждого отдельного опыта, является конкретной реализацией случайной функции, представляющей собой совокупность всех реализаций. Случайная функция x(t) при данном t = ti есть случайная величина x(ti) и называется сечением функции.
При рассмотрении случайных процессов выделяют такие, статистические характеристики которых не изменяются во времени. Эти процессы и соответствующие им случайные функции называются стационарными. Процессы и соответствующие им функции, не обладающие свойством инвариантности (неизменности) статистических характеристик при временных сдвигах, называют нестационарными. Исследование систем, случайные процессы в которых стационарны, значительно проще исследования нестационарных систем. С другой стороны, процессы во многих объектах могут приближённо рассматриваться как стационарные.
Свойство эквивалентности среднего по времени среднему по множеству носит название эргодичности. Для эргодического стационарного процесса все усреднённые характеристики одинаковы для всех реализаций, и эти реализации могут быть заменены одной реализацией, достаточно продолжительной по времени. Для определения характеристик стационарной эргодической случайной функции можно ограничиться одним опытом вместо множества опытов, необходимых для определения характеристик неэргодического процесса. Не всякая стационарная функция является эргодической. Простейшим примером является функция, все реализации которой постоянны по времени, но различны по уровню.
Ниже рассмотрены характеристики случайных процессов в предположении, что они обладают свойствами стационарности и эргодичности.
Основными статистическими характеристиками случайной функции являются: плотность распределения, математическое ожидание, среднее квадратическое отклонение или дисперсия, корреляционная функция, спектральная плотность.
Плотность распределения определяет вероятность того, что значения ординат в произвольный момент времени находятся в определённом интервале:

Математическое ожидание (среднее значение) непрерывной случайной функции
 или
или
Для дискретной случайной функции
 или
или 
Разность  называется центрированной
случайной функцией. Её математическое ожидание равно нулю.
называется центрированной
случайной функцией. Её математическое ожидание равно нулю.
Дисперсия и среднее квадратическое отклонение характеризуют разброс значений x(t) случайной функции относительно математического ожидания. Дисперсия непрерывного и дискретного процессов соответственно равна:
для центрированной функции
для нецентрированной функции

Среднее
квадратическое отклонение 
Плотность вероятности, математическое ожидание и дисперсия не характеризуют протекание случайного процесса во времени. Для оценки временной структуры центрированной случайной функции используют корреляционную функцию, которая определяет взаимосвязь случайных значений функции во времени:
где х(t+t) - значение случайной функции x(t) при смещённом на t значении аргумента (времени).Для дискретной функции
Пусть, например, имеется ряд дискретных значений функции x1, x2, …, xN. Тогда
Из формул видно,
что при нулевом сдвиге (t = 0 илиn=0)
значение Rx будет максимальным и равным дисперсии Dx
(рис. 20). С увеличением сдвига t значения Rx(t) уменьшаются. При
некотором значении t
= t0,
называемом временем корреляции, кривая Rx(t)
пересекает ось абсцисс. При t > t0 значения функции x(t) являются практически
независимыми друг от друга случанйыми величинами. Конечное значение Rx(¥)
=  случайной функцииRx(¥)
= 0. Часто удобнее пользоваться нормированной безразмерной корреляционной функцией
случайной функцииRx(¥)
= 0. Часто удобнее пользоваться нормированной безразмерной корреляционной функцией

|
|
Рис. 20. Графики корреляционной функции Rx(t) и спектральной плотности Sx(w)
Корреляционные функции являются неслучайными и их можно аппроксимировать функциональной зависимостью
В большинстве случаев достаточно ограничиться одним слагаемым

Спектральная плотность пропорциональна квадратам амплитуд колебаний и характеризует энергию колебаний на различных частотах (рис. 18).
Для получения спектральной плотности достаточно взять интеграл Фурье от корреляционной функции:
Этот интеграл называют прямым функциональным преобразованием Фурье. Обратное преобразование позволяет найти корреляционную функцию по спектральной плотности:
Последние два выражения после определённых преобразований можно записать в более удобном для практических расчётов виде:
При t = 0 
Таким образом, дисперсия амплитуд стационарной случайной функции пропорциональна площади, ограниченной кривой Sx(w) и осями координат.
Спектральная
плотность производной случайной функции
Случайный процесс х, в котором отсутствует взаимосвязь между предыдущими и последующими значениями х, называется абсолютно случайным процессом или белым шумом. В этом случае время корреляции t0=0, Rx(t) представляет собой d-функцию, а Sx является постоянной величиной, не зависящей от w. В чистом виде белый шум нереализуем, так как требует бесконечно большой мощности. Однако многие физические процессы близкик нему (в определённом интервале частот).
Из теории случайных функций известно, что для линейного
объекта спектральная плотность выходного сигнала равна спектральной плотности
входного сигнала, умноженной на квадрат модуля АЧХ объекта: 
Тогда дисперсия выходного сигнала
Обычно оптимальными условиями работы объекта являются такие, при которых дисперсия выходного сигнала минимальна.
2.9.2. Математическая модель дороги
При проведении расчетов дорожные неровности можно задавать двояко: в виде конкретной реализации, определенной экспериментально, или в виде случайного сигнала, спектральная плотность которого соответствует требуемому типу дороги.
Все неровности дорожной поверхности условно делят на три группы:
-микронеровности с длиной волны от 0,1 м до 200 м, которые оказывают динамическое воздействие на массы автомобиля и вызывают их колебания;
- макронеровности с длиной волны более 200 м, которые не вызывают заметных колебаний масс;
- шероховатости с длиной волны менее 0,1 м, не вызывающие колебаний масс автомобиля, но влияющие на работу шин. Такие неровности сглаживаются шинами.
В общем случае спектральную плотность микропрофиля дороги Sq(l) можно представить в виде
Sq(l) = K ,
,
где l - путевая частота, рад/м; К, li- коэффициенты, характеризующие микропрофиль дороги.
Многочисленными экспериментами установлено, что Sq(l) – монотонно убывающая функция, на которой возможно появление одной или двух выпуклостей, обусловленных выбоинами и неровностями, возникающими в результате воздействия на дорогуколес автомобиля (рис. 19а). На практике спектральную плотность Sq (l) реальной дороги разбивают на два участка, каждый из которых аппроксимируют выражением (рис. 21 б)
Sqi(l) = Sq(l0) , i = 1,2,
, i = 1,2,
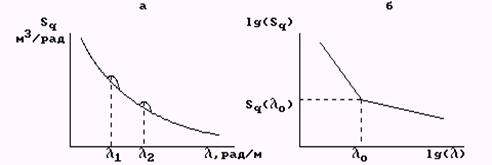 |
где l0 – характерная для данного типа дороги путевая частота, при которой происходит изменение интенсивности убывания Sq(l).
Рис.21. Спектральная плотность неровностей дороги
Спектральную плотность изображают в логарифмических координатах. В этом случае спектральная плотность изображается двумя прямыми, пересекающимися в точке l0, Sq(l0).
Дисперсия высот неровностей дороги не зависит от скорости автомобиля и равна
q =

 .
.
Неровности дороги являются источником возмущений, действующих на автомобиль в целом и на его системы (подвеска, рулевое управление и др.). Их частота зависит как от путевой частоты l, так и скорости автомобиля v: u = lv,рад /с.
Для единичной скорости v= 1 м/с
Sq(u) = Sq(l).
Поскольку дисперсия воздействия дороги и возмущения должны быть неизменными, то
при v¹ 1 м/c
Sq(u) = Sq(l) = Sq(
Sq(l) = Sq(