Модернизация управляющего блока тюнера
Дипломный проект
На тему:Модернизация управляющего блока тюнера.
|
содержание Введение……………………………………………………………………………………….2 1.Анализ технического задания………………………………………………………….….…3 2.Специальный раздел………………………………………………………………………….4 2.1. Принцип функционирования схемы………………………………………………………4 2.2. Описание электрической принципиальной схемы…………………………………….…7 2.3. Выбор и обоснование применения элементной базы…………………………………...23 3 Конструкторско – технологический раздел………………………………………………...31 3.1. Выбор и определение типа платы, ее технологии изготовления, класса точности, габаритных размеров, материала, толщины, шага координатной сетки……………………31 3.2.Описание технологии производства………………………………………………………32 3.2.1 .Резка заготовок…………………………………………………………………………...32 3.2.2. Образование базовых отверстий……………………………………………………..…32 3.2.3. Подготовка поверхности заготовок………………………………………………...…...33 3.2.4. Нанесение рисунка…………………………………………………………………..…..34 3.2.5. Нанесение защитного лака…………………………………………………………..….35 3.2.6. Сверление отверстий………………………………………………………………..…...35 3.2.7. Химическая металлизация………………………………………………………….….. 36 3.2.8. Удаление защитного лака…………………………………………………………..….. 37 3.2.9. Гальваническая затяжка……………………………………………………………...…38 3.2.10. Электролитическое меднение и нанесениезащитного покрытия………….…..…...38 3.2.11. Снятие фоторезиста………………………………………………………………….....39 3.2.12. Травление меди с пробельных мест………………………………………….……..…39 3.2.13. Осветление печатной платы….………………………………………………….….…40 3.2.14. Оплавление металлорезиста…………………………………………………….….….40 3.2.15. Механическая обработка по контуру………………………………………….……..41 3.2.16. Маркировка плат……………………………………………………………….…..…...42 3.2.17. Нанесение защитного покрытия…………………………………….……….…….…. 42 3.2.18. Окончательный контроль……………………………………………….…….………..42 3.3. Конструкторский расчет элементов печатной платы…………………………………....43 3.4. Расчет параметров проводящего рисунка с учетом технологических погрешностей получения защитного рисунка…………………………………………………………………45 3.5.Расчет проводников по постоянному току………………………………………….…….47 3.6.Расчет проводников по переменному току………………………………….…………….48 3.7.Расчет технологичности…………………………………………………………………....50 3.8.Расчет надежности……………………………………………………………………….…50 4. Техника безопасности………………………………………………………………………..52 5. Экономическая часть…………………………………………………………………..…….54 6. Заключение……………………………………………………………………………………77 7. Список использованной литературы………………………………………………..……....78 Приложение 1 Перечень элементов 2 Маршрутная карта |
||||||||||||||
|
Изм |
Лист |
№ Докум |
Подп |
Дата |
||||||||||
|
Разработал |
Модернизация управляющего блока тюнера. Пояснительная записка |
Лит |
Лист |
листов |
||||||||||
|
Проверил |
1 |
|||||||||||||
|
Рецензент |
||||||||||||||
|
Утвердил |
||||||||||||||
|
Введение. Спутниковое телевидение – область техники связи, занимающаяся вопросами передачи телевизионных программ от передающих земных станций к приемным с использованием искусственных спутников земли (ИСЗ) в качестве активных ретрансляторов. Спутниковое вещание является сегодня самым экономичным, быстрым и надежным способом передачи ТВ сигнала высокого качества в любую точку обширной территории. К преимуществам СТВ относятся также возможность использования сигнала неограниченным числом приемных установок, высокая надежность ИСЗ, небольшие затраты и их независимость от расстояния между источником и потребителем. Важной проблемой в приемных установках СТВ является возможность автоматического управления ими. Решить эту проблему можно с помощью микропроцессорных устройств. Использование микроэлектронных средств в изделиях производственного и культурно-бытового назначения не только приводит к повышению технико-экономических показателей изделий (стоимости, надежности, потребляемой мощности, габаритных размеров) и позволяет многократно сократить сроки разработки, отодвинуть сроки «морального старения» изделий, но и придает им принципиально новые потребительские качества (расширенные функциональные возможности). Использование микропроцессоров в системах приема обеспечивает достижение высоких показателей эффективности при столь низкой стоимости, что микропроцессорам, видимо, нет разумной альтернативной элементарной базы для построения управляющих и/или регулирующих систем. |
||||||||||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|||||||||
|
2 |
||||||||||||||
|
1. Анализ технического задания. 1. Основание для разработки. Основанием для разработки является задание на дипломный проект. 2. Цель и назначение разработки. Целью данного проекта является, модернизация управляющего блока тюнера. 3. Источник разработки. Источником разработки является схема электрическая принципиальная. 4. Технические требования. Устройство должно: 4.1. Формировать 3 аналоговых сигнала управления в блоки настройки видео, звука, поляризации со следующими параметрами соответственно: а) Величина изменения напряжения на выходе от 0 до 9 В, шаг изменения в пределах от DUmin=8 мВ до DUmax=10 мВ; б) шкала изменения напряжения на выходе от 0 до 9 В, шаг изменения должен находиться в пределах от DUmin=60 мВ до DUmax=80 мВ; в) шкала изменения напряжения на выходе от 0 до 4,4 В, шаг изменения напряжения должен находитьсявпределах от DUmin=20 мВ до DUmax=25 мВ; 4.2. Выдавать сигналы дискретного управления (8 сигналов). 4.3. Принимать сигналы управления и состояния блоков тюнера. 4.4. Выдавать дискретные сигналы в блок индикации для визуального контроля номера канала от «00» до «99». 4.5. Обеспечивать организацию часов реального времени с выдачей показаний на экран по запросу пользователя. 4.6. Обеспечивать выдачу сигналов в блок экранной графики. 4.7.Должно обеспечивать сохранность информации в ОЗУ и информации о реальном времени при пропадании напряжения сети. 4.8. Устройство должно обеспечивать прием и обработку сигналов от передатчика системы дистанционного управления. 4.9.
Uпит=220 В (187 4.10.
Диапазон рабочих частот: 0,95 5. Требования к надежности. Среднее время наработки на отказ –не менее 20000 часов. 6. Требования к уровню унификации и стандартизации. Максимально использовать стандартные и унифицированные детали и изделия. 7. Требования безопасности обслуживания. Руководствоваться общими требованиями техники безопасности к аппаратуреГОСТ 12.2.007-75. 8. Условия эксплуатации. Климатическое исполнение УХЛ 3.1. ГОСТ 15150-69. Предельные климатические условия: влажность 93 %при Т=25°С, Т=-40°С. |
||||||||||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|||||||||
|
3 |
||||||||||||||
|
( Блок-схема устройства управлениясм ниже)
|
||||||||||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|||||||||
|
4 |
||||||||||||||
|
2. Специальный раздел. 2.1. Принцип функционирования схемы. Схема дистанционного управления (ДУ) генерирует последовательность коротких импульсов ИК излучения, в соответствии с нажатой кнопкой на панели ДУ. Каждая последовательность состоит из 14 импульсов, из которых 11 импульсов информационных, а также предварительный, запускающий и останавливающий импульсы. С помощью 11 информационных импульсов, мы передаем сигнал ДУ, который представляет собой десяти битовое слово. Его четыре первых бита, отведены для передачи адреса, а остальные для передачи команды. Таким образом, можно сформировать 16 групп адресов по 64 команды в каждой (в нашем случае будем использовать 16 команд с одним строго определенным адресом). Двоичная информация каждого бита определяется длительностью интервалов между импульсами. Логическому «0» соответствует основной интервал времени Т, логической «1» – 2Т. Временной интервал между предварительным и запускающим импульсами – 3 Т, между запускающим и первым информационным – Т, между последним информационным и останавливающим – 3Т.
Данная информация поступает в процессор, функции которого: 1)Принять сигналы ДУ; 2)Выделить биты команды; 3)Определить какой кнопке ДУ соответствует данная команда; 4)Обеспечить выполнение данной команды, управляя и синхронизируя деятельностью всего устройства управления. Как известно процессор выполняет все действия согласно программе, которая хранится в ПЗУ. Вопросы записи программыв ПЗУ в данном случае рассматриваться не будут. Значит, для функционирования процессору необходимо считывать информацию (программу), которая хранитсяв ПЗУ. Для этого процессор соединен с ПЗУ тремя шинами: |
||||||||||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|||||||||
|
4 |
||||||||||||||
|
1) Шиной адреса; 2)шиной данных; 3)шиной управления. Для считывания информации из ПЗУ необходимо выполнить следующие действия: 1)обеспечить стабильность уровней сигналов на адресной шине; 2) подготовить шину данных для приема данных в микропроцессор; 3)после шагов 1 и 2 активировать шину управления чтением из памяти. Значит, микропроцессор обрабатывает сигналы ДУ, согласно программе, которая хранится в ПЗУ. Так как в процессе выполнения программы будут формироваться данные, которые понадобятся для дальнейшего функционирования схемы устройства управления, то нужно предусмотреть дополнительную область памяти, где эти данные будут храниться, и откуда при необходимости будут считываться. Для этого в данной схеме используется ОЗУ. Отличительной особенностью ОЗУ от ПЗУ является то, что данные из ОЗУ могут не только считываться, но и записываться в ОЗУ. Для сопряжения микропроцессора и ОЗУ используются те же 3 шины: 1)шина адреса; 2)шина данных; 3)шина управления. Считывание данных из ОЗУ аналогично считыванию данных из ПЗУ, а для записи необходимо выполнить следующие действия: 1)на адресной шине должен быть активирован адрес памяти (т.е. адрес ячейки, куда записываются данные); 2)на шину данных должны поступить данные из микропроцессора; 3)после осуществления действий 1 и 2 на линию записи в память шины управления должен поступить импульс разрешения записи. Вывод: Микропроцессор обрабатывает сигналы ДУ и «принимает» решения согласно программе, хранящейся в ПЗУ. Данные, которые появляются в процессе выполнения программы, хранятся в ОЗУ. Таким образом, на уровне блок-схемы рассмотрены 4 блока устройства управления, их функции и сопряжения между собой. Более подробное описание организации соединения ДУ и микропроцессора, микропроцессора и ОЗУ, микропроцессора и ПЗУ будет рассмотрено ниже. Для лучшего понимания функционального назначения остальных блоков устройства управления сначала познакомимся с классификацией сигналов, поступающих с ДУ: 1) сигналы ДУ, в соответствии с которыми происходит включение необходимого канала с последующей настройкой на нужную частоту видео, звука и настройкой на соответствующую поляризацию. Если на нужном канале уже произведена настройка на нужную частоту видео и звука и настройка на соответствующую поляризацию, эти данные хранятся в ОЗУ и считываются при включении соответствующего канал. |
||||||||||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|||||||||
|
5 |
||||||||||||||
|
2) сигналы ДУ, которыми можно управлять часами реального времени с будильником и календарем. 3)сигнал ДУ, которым можно выключить систему в целом. Значит необходимо, чтобы устройство управления, анализируя сигналы с ДУ согласно программе, хранящейся с ПЗУ, выполняло следующие функции: 1) выдавало аналоговые сигналы в блоке настройки видео, звука и поляризации. Для этого необходимо обеспечить сопряжение периферийных устройств с шиной данных устройства управления и преобразовать цифровые сигналы в аналоговые. В качестве устройства, выполняющего данные функции, будем использовать программное устройство В/В параллельной информации (содержит 3 выходных канала) и 3 цифро-аналоговых преобразователя. Таким образом, на выходе ЦАП будем иметь аналоговый сигнал пропорциональный коду на входе соответствующего канала. В последствии этот сигнал можно использовать в блоках настройки видео, звука, поляризации. 2) выдавало сигналы в блок индикации для визуального контроля. Для этого в данном устройстве управления необходимо предусмотреть блок, который будет фиксировать сигналы, поступающие по шине данных в соответствующие моменты времени. 3) обеспечивало организацию часов реального времени с будильником и календарем с последующей подачей сигналов в блок экранной графики и процессор. Для этого необходимо в устройстве управления использовать таймер, выполняющий данные функции. 4) обеспечить выдачу и прием сигналов в остальные блоки тюнера. Для этого необходимо предусмотреть блок, согласующий внутреннюю шину данных устройства управления с внешними блоками тюнера в соответствующие моменты времени. |
||||||||||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|||||||||
|
6 |
||||||||||||||
|
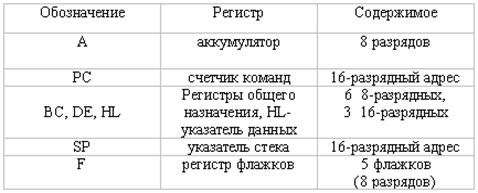
2.2. Описание электрической принципиальной схемы. Микропроцессор 1821ВМ85. На рисунке 1 показана структурная схема ЦП 1821ВМ85. ЦП организован вокруг своей внутренней шины данных, с которой соединены накопитель, арифметико-логическое устройство, регистр кода операций и содержащий 8-битовые и 16-битовые регистры массив регистров. Хотя ЦП 1821ВМ85 это 8-битовая ЭВМ, 16-битовые регистры нужны для адресации памяти (можно адресовать 65536 ячеек). Микропроцессор содержит устройство управления и синхронизации, которые дирижируют движением сигналов во внутренней шине данных и по внешним линиям управления в соответствии с выходными сигналами дешифратора кода операций. Для него требуется источник питания с напряжением 5 В. Микропроцессор имеет 18 8-разрядных регистров. Регистры МП имеют следующее назначение:
В МП использована мультиплексная шина данных. Адрес передается по двум шинам: старший байт адреса – по шине адреса, а младший байт адреса – по шине данных. В начале каждого машинного цикла младший байт адреса поступает на ШД. Этот младший байт может быть зафиксирован в любом 8-разрядном фиксаторе посредством подачи сигнала отпирания фиксатора адреса(ALE). В остальное время машинного цикла шина данных используется для передачи данных между ЦП и памятью или устройствами ввода/вывода. ЦП вырабатывает для шины управления сигналы Сигнал INTR имеет такое же назначение, как и сигнал INT в МП 580ВМ80. Каждый из входов RST5.5, RST6.5, RST7.5. может программно маскироваться. |
||||||||||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|||||||||
|
7 |
||||||||||||||
|
( схему проц-а см. ниже ) |
||||||||||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|||||||||
|
8 |
||||||||||||||
 пот=50 Вт.
пот=50 Вт.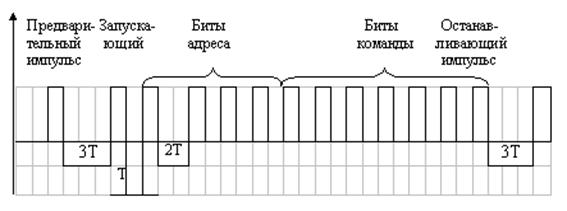
 ,
,  , S0, S1 и IO/М.
Кроме того, он же выдает сигнал подтверждения прерываний INTA.
Сигнал HOLD и все прерывания синхронизируются с помощью
внутреннего генератора тактовых импульсов. Для обеспечения простого
последовательного интерфейса в МП предусмотрены линия последовательного ввода
данных (SOD). МП имеет всего 5 входов для подачи сигналов
прерываний: INTR, RST5.5, RST6.5, RST7.5. и TRAP.
, S0, S1 и IO/М.
Кроме того, он же выдает сигнал подтверждения прерываний INTA.
Сигнал HOLD и все прерывания синхронизируются с помощью
внутреннего генератора тактовых импульсов. Для обеспечения простого
последовательного интерфейса в МП предусмотрены линия последовательного ввода
данных (SOD). МП имеет всего 5 входов для подачи сигналов
прерываний: INTR, RST5.5, RST6.5, RST7.5. и TRAP.|
Прерывания по входу TRAP не может быть маскировано. Если маска прерываний не установлена, то на указанные маскируемые прерывания МП будет реагировать, помещая при этом содержимое счетчика команд в стек и переходя к выполнению программы, адрес которой определяется вектором реестра. Так как прерывания TRAP не может, быть маскировано, при появлении запроса прерывания на этом входе микропроцессор будет всегда переходить к выполнению программы, указанной вектором реестра. Входы сигналов прерываний RST5.5, RST6.5 чувствительны к уровню сигнала, вход RST7.5 чувствителен к переднему фронту сигнала. Значит по входу RST7.5 достаточно подать импульс, чтобы генерировать запрос на прерывания. Каждому прерыванию записан некоторый постоянный приоритет: сигнал TRAP имеет наивысший приоритет, затем идут сигналы RST7.5, RST6.5, RST5.5, сигнал INTR имеет низший приоритет. Прямой доступ к памяти в МП 1821ВМ85 обеспечивается следующим образом: §на вход HOLD нужно подать уровень логической «1». §Когда МП подтверждает получение сигнала HOLD, выходная линия HLDA МП переводится в состояние логической «1». Перевод этой линии в состояние логической «1»означает, что МП прекратил управление АШ, ШД и шиной управления. Для реализации режима ожидания необходимо на вход READY МП 1821ВМ85 подать уровень логического «0». Это необходимо, когда время реакции памяти или устройства ввода/вывода больше, чем время цикла команды. Каждая команда МП состоит из одного, двух или трех байтов, причем первый байт это КОП команды. КОП определяет природу команды, по КОПу ЦП определяет, нужны ли дополнительные байты и если да, ЦП их получит в последующих циклах. Поскольку байт КОПа состоит из 8 бит, может существовать 256 разных КОПов, из числа которых МП 1821ВМ85 использует 244. Основная последовательность действий при выполнении любой команды такова: 1. Микропроцессор выдает в память адрес, по которому хранится код операции команды. 2. Код операции читается из памяти и вводится в микропроцессор. 3. Команда дешифруется процессором. Микропроцессор настраивается на выполнение одной из основных функций в соответствии с результатами дешифрации считанного кода операции. Фундаментальной и отличительной особенностью использования МП при проектировании устройств заключается в следующем: синхронизация всех сигналовв системе осуществляется схемами, входящими в состав кристалла микропроцессора. Скорость выполнения команд зависит от тактовой частоты. Рекомендуемая тактовая частота равна 3.072 МГц. В этом случае длительность одного машинного такта приблизительно равна 325 мс, а требуемое время доступа к памяти - около 525 мс, что соответствует облегченному режиму для МОП памяти. |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
9 |
||||||
|
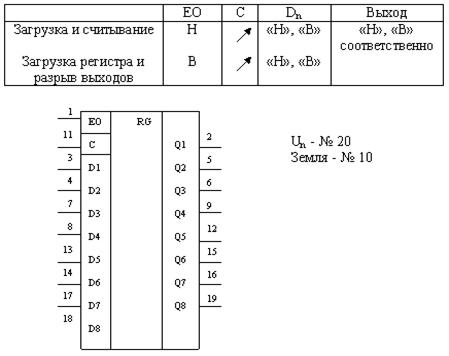
Адресная шина микропроцессора 1821ВМ85. В МП 1821МВ85 используется
принцип «временного мультиплексирования» функций выводов, когда одни и те же
выводы в разные моменты времени представляют разные функции. Это позволяет
реализовать ряд дополнительных функций при тех же 40 выводах в корпусе МП.
Восемь мультиплексированных выводов играют роль шины данных, либо младших
разрядов адресной шины. Необходимо «фиксировать» логические состояния выводов
AD0 Регистр – это линейка из нескольких триггеров. Можно предусмотреть логическую схему параллельного отображения на выходах состояния каждого триггера. Тогда после заполнения регистра от параллельных выводов, по команде разрешения выхода, накопленное цифровое слово можно отобразить поразрядно сразу на всех параллельных выходах. Для удобства поочередной выдачи данных от таких регистров (буферных накопителей) в шину данных процессора параллельные выходы регистров снабжаются выходными буферными усилителями, имеющими третье, разомкнутое Z состояние. Микросхема 1533ИR22 – восьмиразрядный регистр – защелка отображения данных, выходные буферные усилители которого имеют третье Z –состояние. Пока напряжение на входе №11 высокого уровня, данные от параллельных входов отображаются на выходах. Подачей на вход № 11 напряжения низкого уровня, разрешается запись в триггеры нового восьмибитового байта. Если на вход № 1 подать напряжение высокого уровня, выходы микросхемы переходят в 3-е Z состояние. Таким образом, с помощью микросхемы 1533ИR22 мы фиксируем адресную информацию, поступающую от МП. |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
10 |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
11 |
||||||
|
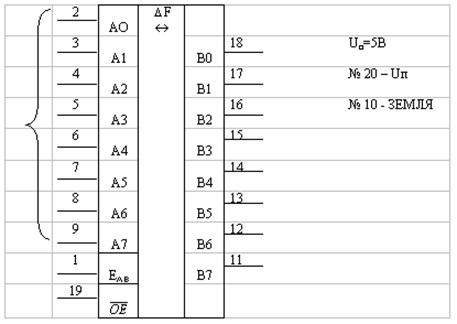
Шина данных микропроцессора 1821ВМ85. Шина данных в отличие от шины адреса является двунаправленной. Значит необходимо предусмотреть буфер, который по соответствующим сигналам управления от МП будет пропускать данные как к МП, так и от него. В качестве двунаправленного буфера будем использовать микросхему 1533 АП6. Микросхема
1533 АП6 содержит 8 ДНШУ с тремя состояниями выводов, два входа разрешения ЕАВ
- №1 (переключение направления каналов) и
В качестве управляющих сигналов будем использовать
сигналы Подача сигнала EN на вход № 19 микросхемы 1533 АП6, при котором выводы переходят в третье Z состояние, будет рассмотрена ниже.
|
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
12 |
||||||
|
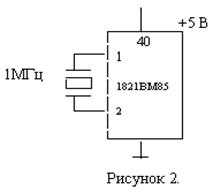
Генератор тактовых импульсов для микропроцессора 1821 ВМ85. Схема генератора тактовых импульсов микропроцессора 1821ВМ85 содержится в самом микропроцессоре. Достаточно подключить кварцевый резонатор к выводам № 1 и № 2 МП. Кварцевый резонатор может иметь любую частоту колебаний в диапазоне от 1 до 6 МГц. Эта частота делится пополам, и соответствующие импульсы используются в МП. На рисунке 2 показана схема подключения кварцевого резонатора, в результате чего обеспечивается синхронизация МП 1821ВМ85.
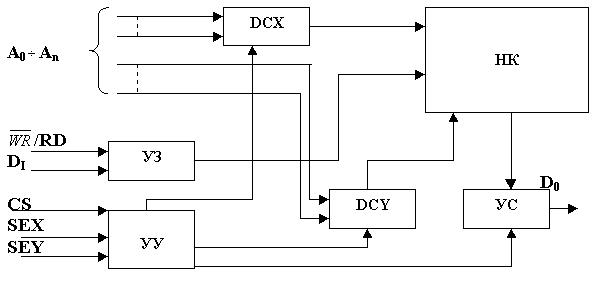
Оперативные запоминающие устройства. ОЗУ предназначены для записи, хранения и считывания двоичной информации. Структурнаясхемапредставлена на рисунке 3.
Рисунок 3НК – накопитель; DCX, DCY – дешифраторы строк и столбцов; УЗ – устройство записи, УС – устройство считывания, УУ – устройство управления. Т.к. ОЗУ организовано как 2Кх8, значит необходимо
использовать АО |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
13 |
||||||
|
Для управления функционированием схемы используется 3 вывода: 1) 2)CE - № 18 3)OE - № 20 Микросхема 537РУ10 функционирует в 3 режимах: §режим хранения данных §режим считывания данных §режим записи данных Таблица истинности:
Запись и считывание производится по 8 бит. При
считывании можно запретить вывод информации (
|
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
14 |
||||||
|
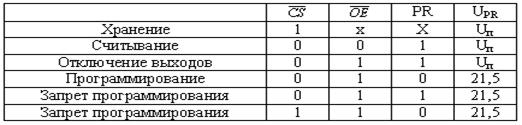
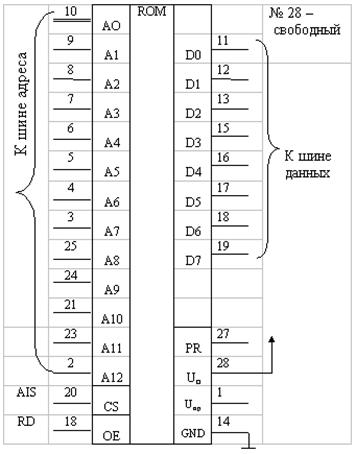
Постоянное запоминающее устройство. Структурная схема ПЗУ аналогична структурной схеме ОЗУ, только отсутствует устройство записи, т.к. после программирования ПЗУ, информация из него только считывается. Так как ПЗУ организована как 8к х 8, значит
необходимо использовать А0 Для управления функционирования схемы используются 2 вывода: CS - №20, ОЕ - №22. Микросхема 573РФ4 функционирует в 2-х режимах: режим хранения и режим считывания. Считывание информации производится по 8 бит. В качестве сигналов управления будем использовать сигнал RD и сигнал, который будет поступать по старшей адресной линии. Таблица истинности:
|
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
15 |
||||||
|
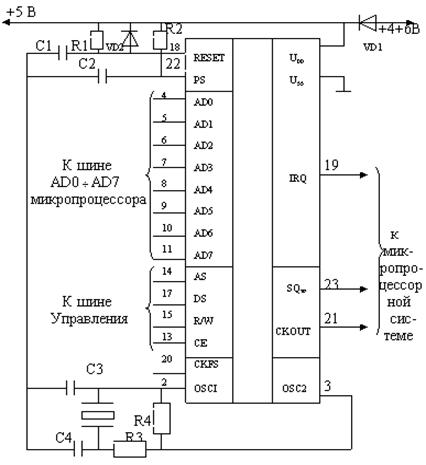
Таймер. Одно из наиболее необходимых эксплуатационных удобств – наличие встроенных часов, показания которых постоянно или по запросу оператора выводятся на экран. Можно также обеспечить выдачу команд на включение или выключение внешних устройств в заданное время. Часы могут быть реализованы как программно, так и аппаратно. Условное обозначение и основная схема включения:
Сигнал тактового генератора можно снять с выхода CKOUT для использования в других устройствах системы. Он поступает на этот вход непосредственно (CKFS=1) или после деления частоты на четыре (CKFS=0). Микросхема имеет выход ещё одного сигнала (SQW), получаемого делением частоты тактового генератора. Коэффициент деления задается командами, поступающими от процессора. Включается и выключается этот сигнал также командами процессора. Микросхема связана с микропроцессором через
двунаправленную мультиплексированную шину адреса – данных (AD0 |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
16 |
||||||
|
Распределение памяти микросхемы 512ВИ1:
Сигнал
AS подается в виде положительного импульса во время наличия информации
об адресе на шине AD0 В
этот же момент анализируется логический уровень сигнала на входе DS и в
зависимости от него устанавливается дальнейший режим работы входов DS и R/ Выход 1)после окончания обновления информации 2)по будильнику 3)периодические (с периодом SQW) Вход Вход PS (датчик питания) – контроль непрерывности подачи питающего напряжения. Он подключается таким образом, чтобы напряжение на нем падало до 0 при любом, даже кратковременном отключения питания микросхемы. |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
17 |
||||||
 - №19 (перевод
выхода канала в состояние Z).
- №19 (перевод
выхода канала в состояние Z).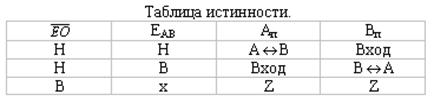

 RE - №
21
RE - №
21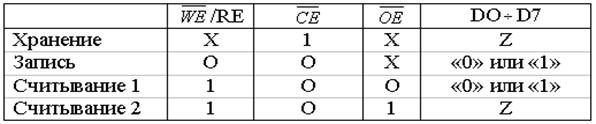
 WR, RD, CSO.
WR, RD, CSO.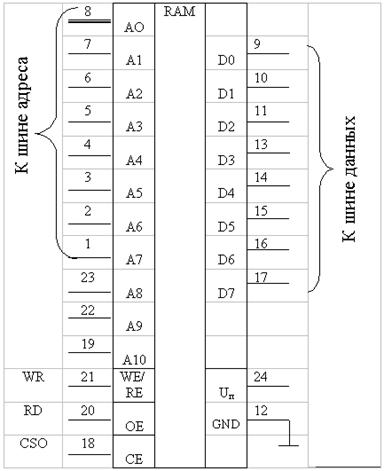
 (выбор микросхемы), AS
(строб, адреса), DS (строб данных) и R/
(выбор микросхемы), AS
(строб, адреса), DS (строб данных) и R/ (чтение – запись).
(чтение – запись).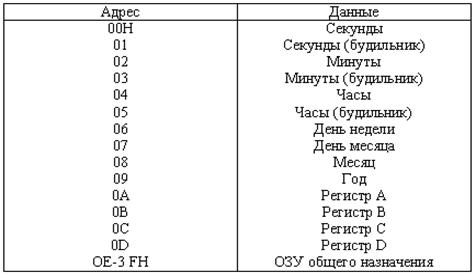
 (запрос прерывания)
предназначен для сигнализации процессору о том, что внутри микросхемы
произошло событие, требующее программной обработки. Прерывания бывают 3-х
типов:
(запрос прерывания)
предназначен для сигнализации процессору о том, что внутри микросхемы
произошло событие, требующее программной обработки. Прерывания бывают 3-х
типов:
|
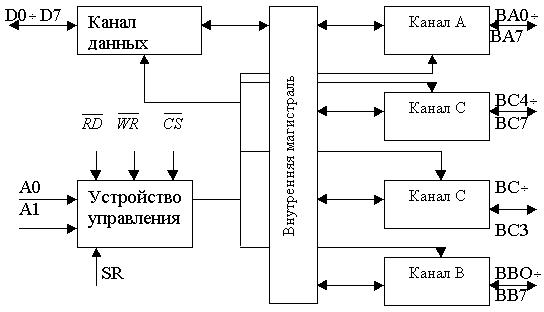
Устройство ввода-вывода. Программное устройство ввода-вывода параллельной информации, применяется в качестве элемента ввода-вывода общего назначения, сопрягающего различные типы периферийных устройств с магистралью данных систем обработки информации.
Обмен информацией между магистралью данных систем и микросхемой 580ВВ85 осуществляется через 8 разрядный двунаправленный трехстабильный канал данных. Для связи с периферийными устройствами используется 24 линии В/В, сгруппированные в три 8 разрядных канала ВА, ВВ, ВС, направление передачи информации и режимы работы которых определяются программным способом.
1-4; 37-40 – ВА3 – ВА0; ВА7 10 18 5 - 6 - 7 – GND - - - общий. 8,9 – А0, А1 – вход – младший разряд адреса 26 – Uсс – питание. 35 – SR – вход – установка исходного состояния. 36 - Микросхема может функционировать в 3-х основных режимах. В режиме 0 обеспечивается возможность синхронной программно управляемой передачи данных через 2 независимых 8 разрядных канала ВА, ВВ и два 4 разрядных канала ВС. |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
18 |
||||||
|
В режиме 1 обеспечивается возможность ввода или вывода информации в/или из периферийного устройства через 2 независимых 8 разрядных канала ВА, ВВ по сигналам квитирования. При этом линии канала С используются для приема и выдачи сигналов управления обменом. В режиме 2 обеспечивается возможность обмена информациейс периферийными устройствами через двунаправленную 8 разрядную шину ВА по сигналам квитирования. Для передачи и приема сигналов управления обменом используются 5 линий канала ВС. Выбор соответствующего канала и направление
передачи информации через канал определяется сигналами А0, А1 и сигналами |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
19 |
||||||
 - вход – выбор
кристалла.
- вход – выбор
кристалла.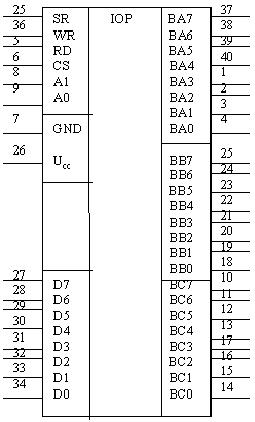
|
Фиксирующая схема. Как уже отмечалось выше необходимо подавать сигналы в блок индикации № канала (2 индикатора) в строго определенные моменты времени. Для этого необходимо предусмотреть устройство, которое по сигналам от процессора, будет пропускать информацию на один из индикаторов блока индикации. В качестве элементов фиксирующей схемы будем использовать 2 регистра типа 1533UP23. Регистр, аналогичный UP22, нос 8 тактируемыми триггерами. Регистр принимает и отображает информацию синхронно с положительным перепадом на тактовом входе.
Таким образом, подавая тактирующие сигналы на вход С (№11) регистра 1533UP23, мы разрешаем прохождение сигналов на соответствующий индикатор в строго определенные моменты времени. Согласующая схема. Для организации вывода информации в остальные блоки тюнера будем использовать регистр 1533UP23, тактируемый сигналами от микропроцессора. Для приема информации в устройство управления будем использовать шинный формирователь 1533АП6. Как известно шинный формирователь обеспечивает передачу информации в обоих направлениях. Для обеспечения только ввода данных вывод №1 соединим с корпусом. Если появится необходимость в выводе большего количества информации из устройства управления, то с помощью микросхемы 1533АП6 можно будет решить данную проблему. |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
20 |
||||||
|
Схема дешифрации. В
предыдущих главах были рассмотрены основные блоки схемы управления и было
отмечено, что МП в строго определенные моменты времени должен
взаимодействовать с определенными микросхемами. Поэтому в данной схеме
необходимо предусмотреть устройство, которое по сигналам от процессора, будет
подключать к его шинам адреса или данных ту или иную микросхему или группу
микросхем. Из этого можно заключить, что в схеме системы должен протекать
некоторый процесс однозначного выбора и он организуется подачей на линии
адреса А11
Микросхема 1533ИД7 – высокоскоростной дешифратор, преобразующий
трехразрядный код А0
Дешифрация происходит, когда на входах В
качестве информационных сигналов будем использовать сигналы, поступающие по
адресным линиям А11 Цифро-аналоговый преобразователь. Для преобразования цифровой информации в аналоговую необходимо использовать ЦАП.
|
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
21 |
||||||


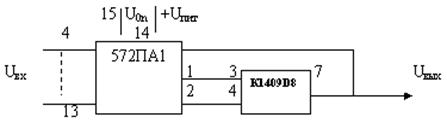
|
Основной характеристикой ЦАП является разрешающая способность, определяемая числом разрядов N. Теоретически ЦАП, преобразующий N-разрядные двоичные коды, должен обеспечивать 2N различных значений выходного сигнала с разрешающей способностью (2N-1)-1. В нашем случае необходимо организовать формирование 3-х аналоговых сигналов ANL1, ANL2 и ANL3, которые будут пропорциональны цифровым сигналам на выходах канала А, В, С микросхемы 580ВВ55 соответственно. Значит необходимо предусмотреть 3 цифро-аналоговых преобразователя. Свой выбор я остановил на 10 разрядном ЦАП прецизионного типа 572ПА1. Для построения полной схемы преобразователя к микросхеме 572ПА1 необходимо подключить операционный усилитель. В качестве операционного усилителя будем использовать К140УД8, имеющего схему внутренней коррекции. Дополнительные пояснения к схеме управления. Во избежание записи или считывания «ложной» информации во время включения или выключения напряжения питания в схеме устройства управления предусмотрена микросхема DD8 – четырехканальный коммутатор цифровых и аналоговых сигналов. Прежде чем последовательность коротких импульсов подавать на вход SID микропроцессора, необходимо обеспечить хорошую стабильность длительности данных импульсов, т.к. на входе элемента Шмидта все они будут иметь разную длительность. В составе серий ТТЛ имеется несколько аналого-импульсных схем – ждущих мультивибраторов. Они позволяют расширить длительность коротких импульсов, сформировать импульсы нужной длительности с хорошей стабильностью по длительности. |
||||||
|
Изм. |
Лист |
№ Докум. |
Подп. |
Дата |
Лист |
|
|
22 |
||||||
|
2.3. Выбор и обоснование применения элементной базы. Для создания разрабатываемого устройства согласно техническому заданию необходимо применить комплектующие отечественного производства и максимально использовать стандартные компоненты и изделия. Исходя из этого выбор элементной базы будет следующим. Чертежи: 1)электрическая принципиальная схема (в AutoCad ) 2)сборочный чертеж 3)разводка платы с двух сторон Также есть маршрутные карты для раздела экономики. |