Радиолокационная Головка Самонаведения
| Загрузить архив: | |
| Файл: ref-20401.zip (617kb [zip], Скачиваний: 61) скачать |
Государственный комитет РФ по высшему образованию
БАЛТИЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
_____________________________________________________________
Кафедра радиоэлектронных устройств
РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ
Санкт-Петербург
2002
2. ОБЩИЕ СВЕДЕНИЯ О РЛГС.
2.1 Назначение
Радиолокационная головка самонаведения устанавливается на ракете класса "земля-воздух" для обеспечения на конечном этапе полета ракеты автоматического захвата цели, ее автосопровождения и выдачи сигналов управления на автопилот (АП) и радиовзрыватель (РБ).
2.2 Технические характеристики
РЛГС характеризуется следующими основными тактико-техническими данными:
1. зона поиска по направлению:
- по азимуту ± 10°
- по углу места ± 9°
2. время обзора зоны поиска 1,8 - 2,0 сек.
3. время захвата цели по углу 1,5 сек (не более)
4. маμмальные углы отклонения зоны поиска:
- по азимуту ± 50°(не менее)
- по углу места± 25° (не менее)
5. маμмальные углы отклонения равносигнальной зоны:
- по азимуту ± 60°(не менее)
- по углу места± 35° (не менее)
6. дальность захвата цели типа самолета ИЛ-28 с выдачей сигналов управления на (АП) при вероятности не ниже 0,5 -19 км, а при вероятности не ниже 0,95 -16 км.
7 зона поиска по дальности 10 - 25 км
8. рабочий диапазон частот f ± 2,5%
9. средняя мощность передатчика 68 Вт
10. длительность ВЧ-импульса 0,9 ± 0,1 мксек
11. период следования ВЧ-импульсов Т ± 5%
12. чувствительность приемных каналов - 98дб (не менее)
13.потребдяема мощность от источников питания:
- от сети 115 в 400 Гц 3200 Вт
- от сети 36 в 400 Гц 500 Вт
- от сети 27 600 Вт
14.вес станции – 245 кг.
3. ПРИНЦИПЫ ДЕЙСТВИЯ И ПОСТРОЕНИЯ РЛГС
3.1 Принцип действия РЛГС
РЛГС представляет собой радиолокационную станцию 3-х сантиметрового диапазона, работающую в режиме импульсного излучения. При самом общем рассмотрении РЛГС может быть разбита на две части: - собственно радиолокационную часть и автоматическую часть, обеспечивающую захват цели, ее автоматическое сопровождение по углу и дальности и выдачу сигналов управления на автопилот и радиовзрыватель.
Радиолокационная часть станции работает обычным образом. Высокочастотные электромагнитные колебания, генерируемые магнетроном в виде очень коротких импульсов, излучаются с помощью остронаправленной антенны, принимаются той же антенной, преобразуются и усиливаются в приемном устройстве, проходят далее в автоматическую часть станции - систему углового сопровождения цели и дальномерное устройство.
Автоматическая часть станции состоит из трех следующих функциональных систем:
1. системы управления антенной, обеспечивающей управление антенной во всех режимах работы РЛГС (в режиме "наведение', в режиме "поиск" и в режиме "самонаведение", который в свою очередь, подразделяется на режимы "захват" и "автосопровождение")
2. дальномерного устройства
3. вычислителя сигналов управления, подаваемых на автопилот и радиовзрыватель ракеты.
Система управления антенной в режиме "автосопровождение" работает по так называемому дифференциальному методу, в связи с чем в станции применена специальная антенна, состоящая из сфероидального зеркала и 4-х излучателей, вынесенных на некоторое расстояние перед зеркалом.
При работе РЛГС на излучение формируется одно-лепестковая диаграмма направленности с маμмумом совпадающим с осью антенной системы. Это достигается за счет разной длины волноводов излучателей - имеется жесткий сдвиг по фазе между колебаниями разных излучателей.
При работе на прием диаграммы направленности излучателей сдвинуты относительно оптической оси зеркала и пересекаются на уровне 0,4.
Связь излучателей с приемопередающим устройством осуществляется через волноводный тракт, в котором имеются два последовательно включенных ферритовых коммутатора:
· коммутатор осей (ФКО), работающий с частотой 125 Гц.
· коммутатор приемников (ФКП), работающий с частотой 62,5 Гц.
Ферритовые коммутаторы осей переключают волноводный тракт таким образом, что сначала подключают к передатчику все 4 излучателя, формируя одно-лепестковую диаграмму направленности, а затем к двухканальному приемнику, то излучатели, создающие две диаграммы направленности, расположенные в вертикальной плоскости, то излучатели, создающие две диаграммы направленности в горизонтальной плоскости. С выходов приемников сигналы попадают на схему вычитания, где в зависимости от положения цели относительно равносигнального направления, образованного пересечением диаграмм направленности данной пары излучателей, вырабатывается разностный сигнал, амплитуда и полярность которого определяется положением цели в пространстве (рис. 1.3).

Синхронно с ферритовым коммутатором осей в РЛГС работает схема выделения сигналов управления антенной, с помощью которой вырабатывается сигнал управления антенной по азимуту и по углу места.
Коммутатор приемников переключает входы приемных каналов с частотой 62,5Гц. Коммутация приемных каналов связана с необходимостью усреднения их характеристик, так как дифференциальный метод пеленгации цели требует полной идентичности параметров обоих приемных каналов. Дальномерное устройство РЛГС представляет собой систему с двумя электронными интеграторами. С выхода первого интегратора снимается напряжение, пропорциональное скорости сближения с целью, с выхода второго интегратора - напряжение, пропорциональное дальности до цели. Дальномер осуществляет захват ближайшей цели в диапазоне 10-25км с последующим ее автосопровождением до дальности 300 метров. На дальности 500 метров с дальномера выдается сигнал, служащий для взвода радио-взрывателя (РВ).
Вычислитель РЛГС является счетно-решающим устройством и служит для Формирования сигналов управления, выдаваемых РЛГС на автопилот (АП) и РВ. На АП подаётся сигнал, представляющий проекции вектора абсолютной угловой скорости луча визирования цели на поперечные оси ракеты. Эти сигналы используются для управления ракетой по курсу и тангажу. На РВ с вычислителя поступает сигнал, представляющий проекцию вектора скорости сближения цели с ракетой на полярное направление луча визирования цели.
Отличительными особенностями РЛГС по сравнению с другими аналогичными ей по своим тактико-техническим данным станциями являются:
1. применение в РЛГС длиннофокусной антенны, характеризующейся тем, что Формирование и отклонение луча осуществляется в ней с помощью отклонения одного довольно легкого зеркала, угол отклонения которого вдвое меньше угла отклонения луча. Кроме того, в такой антенне отсутствуют вращающиеся высокочастотные переходы, что упрощает ее конструкцию.
2. использование приемника с линейно-логарифмической амплитудной характеристикой, что обеспечивает расширение динамического диапазона канала до 80 дб и, тем самым, делает возможным пеленгацию источника активной помехи.
3. построение системы углового сопровождения по дифференциальному методу, обеспечивающему высокую помехозащищенность.
4. применение в станции оригинальной двухконтурной замкнутой схемы компенсации рыскания, обеспечивающей высокую степень компенсации колебаний ракеты относительно луча антенны.
5. конструктивное выполнение станции по так называемому контейнерному принципу, характеризующемуся целым рядом преимуществ в отношении снижения общего веса, использовании отведенного объема, уменьшении межблочных связей, возможности применения централизованной системы охлаждения и т.п.
3.2 Отдельные функциональные системы РЛГС
РЛГС может быть разбита на ряд отдельных функциональных систем, каждая из которых решает вполне определенную частную задачу (или несколько более или менее близких между собой частных задач) и каждая из которых в той или иной мере оформлена в виде отдельной технологической и конструктивной единицы. Таких Функциональных систем в РЛГС четыре:
3.2.1 Радиолокационная часть РЛГС
Радиолокационная часть РЛГС состоит из:
· передатчика.
· приемника.
· высоковольтного выпрямителя.
· высокочастотной части антенны.
Радиолокационная часть РЛГС предназначена:
· для генерирования высокочастотной электромагнитной энергии заданной частоты (f±2,5%) и мощности 60 Вт, которая в виде коротких импульсов (0,9 ± 0,1 мксек) излучается в пространство.
· для последующего приема отраженных от цели сигналов, их преобразования в сигналы промежуточной частоты (Fпч=30 МГц), усиления (по 2-м идентичным каналам), детектирования и выдачи на другие системы РЛГС.
3.2.2. Синхронизатор
Синхронизатор состоит из:
· узла манипуляции приема и синхронизации (МПС-2).
· узла коммутации приемников (КП-2).
· узла управления ферритовыми коммутаторами (УФ-2).
· узла селекции и интегрирования (СИ).
· узла выделения сигнала ошибки (СО)
· ультразвуковой линии задержки (УЛЗ).
Назначением этой части РЛГС является:
· формирование импульсов синхронизации для запуска отдельных схем в РЛГС и импульсов управления приемником, узлом СИ и дальномером (узел МПС-2)
· формирование импульсов управления ферритовым коммутатором осей, ферритовым коммутатором приемных каналов и опорного напряжения (узел УФ-2)
· интегрирование и суммирование принятых сигналов, нормирование напряжения для управления АРУ, преобразование видеоимпульсов цели и АРУ в радиочастотные сигналы (10 МГц) для осуществления задержки их в УЛЗ (узел СИ)
· выделение сигнала ошибки, необходимого для работы системы углового сопровождения (узел СО).
3.2.3. Дальномер
Дальномер состоит из:
· узла временного модулятора (ЕМ).
· узла временного дискриминатора (ВД)
· двух интеграторов.
Назначением этой части РЛГС является:
· поиск, захват и сопровождение цели по дальности с выдачей сигналов дальности до цели и скорости сближения с целью
· выдача сигнала Д-500 м
· выдача импульсов селекции для стробирования приемника
· выдача импульсов ограничения времени приема.
3.2.4. Система управления антенной (СУА)
Система управления антенной состоит из:
· узла поиска и гиростабилизации (ПГС).
· узла управления головкой антенны (УГА).
· узла автомата захвата ( A3 ).
· узла запоминания (ЗП).
· выходных узлов системы управления антенной (УС) (по каналу φ и каналу ξ).
· узла электрической пружины (ЗП).
Назначением этой части РЛГС является:
· управление антенной при взлете ракеты в режимах наведение, поиск и подготовка к захвату (узлы ПГС, УГА, УС и ЗП)
· захват цели по углу и ее последующее автосопровождение (узлы A3, ЗП, УС, и ЗП)
4. ПРИНЦИП ДЕЙСТВИЯ СИСТЕМЫ УГЛОВОГО СОПРОВОЖДЕНИЯ ЦЕЛИ
В функциональной схеме системы углового сопровождения цели отраженные импульсные сигналы высокой частоты, принятые двумя вертикальными или горизонтальными излучателями антенны, через ферритовый коммутатор (ФКО) и ферритовый коммутатор приемных каналов - (ФКП) поступают на входные фланцы радиочастотного приемного блока. Для уменьшения отражений от детекторный секций смесителей (СМ1 и СМ2) и от разрядников защиты приемника (РЗП-1 и РЗП-2) в течение времени восстановления РЗП, ухудшающих развязку между приемными каналами, перед разрядниками (РЭП) поставлены резонансные ферритовые вентили (ФВ-1 и ФВ-2). Отраженные импульсы, поступившие на входы радиочастотного приемного блока, через резонансные вентили (Ф A-1 и Ф В-2) подаются на смесители (CM-1 и СМ-2) соответствующих каналов, где смешиваясь с колебаниями клистронного генератора, преобразуются в импульсы промежуточной частоты. С выходов смесителей 1-го и 2-го каналов импульсы промежуточной частоты поступают на предварительные усилители промежуточной частоты соответствующих каналов - (узел ПУПЧ). С выхода ПУПЧ усиленные сигналы промежуточной частоты поступают на вход линейно-логарифмического усилителя промежуточной частоты (узлы УПЧЛ). Линейно-логарифмические усилители промежуточной частоты производят усиление, детектирование и последующее усиление по видеочастоте поступивших с ПУПЧ импульсов промежуточной частоты.
Каждый линейно-логарифмический усилитель состоит из следующих функциональных элементов:
· Логарифмического усилителя, в состав которого входит УПЧ (6 каскадов)
· Транзисторов (ТР) для развязки усилителя от линии сложения
· Линии сложения сигналов (ЛС)
· Линейного детектора (ЛД), который в диапазоне входных сигналов порядка 2-15дб дает линейную зависимость входных сигналов от выходных
· Суммирующего каскада (Σ), в котором происходит сложение линейной и логарифмической составляющей характеристики
· Видеоусилителя (ВУ)
Линейно-логарифмическая характеристика приемника необходима для расширения динамического диапазона приемного тракта до 30 дб и устранения перегрузок, обусловленных действием помех. Если рассматривать амплитудную характеристику, то на начальном участке она линейна и сигнал пропорционален входному, при возрастании входного сигнала приращение выходного сигнала уменьшается.
Для получения логарифмической зависимости в УПЧЛ применен метод последовательного детектирования. Первые шесть каскадов усилителя работают как линейные усилители при малых уровнях входных сигналов и как детекторы - при больших уровнях сигналов. Видеоимпульсы, образующиеся при детектировании, с эмиттеров транзисторов УПЧ поступают на базы транзисторов развязки, на общей коллекторной нагрузке которых происходит их сложение.
Для получения начального линейного участка характеристики, сигнал с выхода УПЧ подается на линейный детектор (ЛД). Общая линейно-логарифмическая зависимость получается в результате сложения логарифмической и линейной амплитудной характеристики в каскаде сложения.
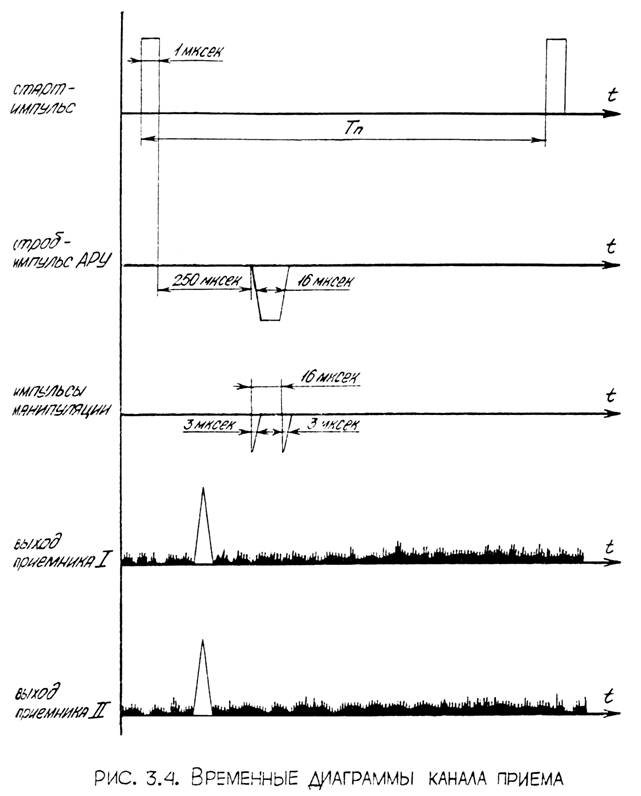
В связи с необходимостью иметь достаточно стабильный уровень шумов приемных каналов. В каждом приемном канале применена система инерционной автоматической регулировки усиления по шумам (АРУ). Для этой цели выходное напряжение с узла УПЧЛ каждого канала поступает на узел ПРУ. Через предварительный усилитель (ПРУ), ключ (КЛ) это напряжение поступает на схему выработки ошибки (СВО), в которую вводится также опорное напряжение "уровень шумов" с резисторов R4, R5, величина которых определяет, уровень шумов на выходе приемника. Разница между напряжением шумов и напряжением опоры является выходным сигналом видеоусилителя узла АРУ. После соответствующего усиления и детектирования сигнал ошибки в виде постоянного напряжения подается на последний каскад ПУПЧ. Для исключения работы узла АРУ от различного рода сигналов, которые могут иметь место на входе приемного тракта (АРУ должно работать только по шумам), введена коммутация как системы АРУ, так и клистрона блока. Система АРУ нормально заперта и открывается лишь на время строб-импульса АРУ, который расположен вне зоны приема отраженных сигналов (через 250 мксек после импульса запуска ПРД). Для того, чтобы исключить влияние различного рода внешних помех на уровень шумов, генерация клистрона срывается на время работы АРУ, для чего строб-импульс поступает также и на отражатель клистрона (через выходной каскад системы АПЧ). (рис 2.4)[1]
Необходимо отметить, что срыв генерации клистрона во время работы АРУ приводит к тому, что составляющая шумов, которая создается смесителем, не учитывается системой АРУ, что приводит к некоторой нестабильности общего уровня шумов приемных каналов.
На узлы ПУПЧ обоих каналов, которые являются единственными линейными элементами приемного тракта (по промежуточной частоте) заводятся почти все управляющие и коммутирующие напряжения:
· Регулирующие напряжения АРУ;
· Импульсы манипуляции - кратковременные отрицательные импульсы, совпадающие с фронтом и спадом строб-импульса АРУ, предназначенные для запирания приемника в моменты коммутации клистрона, так как это вызывает появление паразитных сигналов на выходе приемников (рис. 3.4)
· Импульс супрессии (старт-импульс), предназначенный для подавления зондирующего импульса в приемном тракте. Для лучшего подавления зондирующего импульса старт-импульс заводится также на вход 1-го каскада видеоусилителя в узле УПЧЛ в противофазе с приходящими паразитными сигналами от зондирующих импульсов.
В радиочастотном приемном блоке РЛГС находится также схема автоматической подстройки частоты клистрона (АПЧ), в связи с тем, что в системе подстройки применен клистрон с двойным управлением по частоте - электронным (в небольшом диапазоне частот) и механическим (в большом диапазоне частот) система АПЧ также подразделяется на электронную и электромеханическую систему подстройки частоты. Напряжение с выхода электронной АПЧ подается на отражатель клистрона и осуществляет электронную подстройку частоты. Это же напряжение поступает на вход схемы электромеханической подстройки частоты, где преобразуется в переменное напряжение, и далее подается на обмотку управления двигателя, который осуществляет механическую подстройку частоты клистрона. Для нахождения правильной настройки гетеродина (клистрона), соответствующей разностной частоте порядка 30 МГЦ, в АПЧ предусмотрена схема электромеханического поиска и захвата. Поиск происходит во всем диапазоне перестройки частоты клистрона при отсутствии сигнала на входе АПЧ. Система АПЧ работает лишь во время излучения зондирующего импульса. Для этого питание 1-гo каскада узла АПЧ осуществляется продифференцированным старт-импульсом.
С выходов УПЧЛ видеоимпульсы цели поступают в синхронизатор на схему суммирования (СХ "+") в узле СИ и на схему вычитания (СХ "-") в узле СО. Импульсы цели с выходов УПЧЛ 1-го и 2-го каналов, промодулированные частотой 123 Гц (с этой частотой осуществляется коммутация осей), через эмиттерные повторители ЗП1 и ЗП2 попадают на схему вычитания ( СХ "-"). С выхода схемы вычитания разностный сигнал, полученный в результате вычитания сигналов 1-го канала из сигналов 2-го канала приемника, попадает на ключевые детекторы (КД-1, КД-2), где осуществляется его селективное детектирование и разделение сигнала ошибки по осям "ξ" и "φ". Разрешающие импульсы, необходимые для работы ключевых детекторов, формируются в специальных схемах в этом же узле. На одну из схем формирования разрешающих импульсов (СФРИ) поступают импульсы интегрированной цели из узла "СИ" синхронизатора и опорное напряжение 125– (I) Гц, на другую - импульсы интегрированной цели и опорное напряжения 125 Гц – (II) в противофазе. Разрешающие импульсы формируются из импульсов интегрированной цели в момент положительного полупериода опорного напряжения.
Опорные напряжения 125 Гц –(I), 125 Гц – (II), сдвинутые относительно друг друга на 180, необходимые для работы схем формирования разрешающих импульсов (СФРИ) в узле СО синхронизатора, а также опорное напряжение по каналу "φ" вырабатывается путем последовательного деления на 2 частоты повторения станции в узле КП-2 (коммутация приемников) синхронизатора. Деление частоты производится с помощью делителей частоты, представляющих собой RS-триггеры. Схема формирования импульса запуска делителей частоты (ОΦЗ) запускается задним фронтом продифференцированного отрицательного импульса ограничения времени приема (Т= 250 мксек), который поступает с дальномера. Со схемы выдачи напряжения 125 Гц - (I), и 125 Гц – (II) (СВ) снимается импульс синхронизации с частотой 125 Гц , поступающий на делитель частоты в узле УФ-2 (ДЧ).Кроме этого напряжение 125 Гц поступает на схему формирования сдвига на 90 относительно опорного напряжения. Схема формирования опорного напряжения по каналу (TOH φ) собрана на триггере. Импульс синхронизации 125 Гц подается на схему делителя в узле УФ-2, с выхода этого делителя (ДЧ) снимается опорное напряжение "ξ" с частотой 62,5 Гц, подаваемое в узел УС и также в узел КП-2 для Формирования сдвинутого на 90 градусов опорного напряжения.
В узле УФ-2 также формируются импульсы тока коммутации осей с частотой 125 Гц и импульсы тока коммутации приемников с частотой 62,5 Гц, (рис. 4.4).
Разрешающий импульс открывает транзисторы ключевого детектора и конденсатор, являющийся нагрузкой ключевого детектора, заряжается до напряжения, равного амплитуде результирующего импульса, приходящего со схемы вычитания. В зависимости от полярности приходящего импульса заряд будет носить положительный или отрицательный знак. Амплитуда результирующих импульсов пропорциональна углу рассогласования между направлением на цель и направлением равносигнальной зоны, поэтому напряжение до которого заряжен конденсатор ключевого детектора, является напряжением сигнала ошибки.

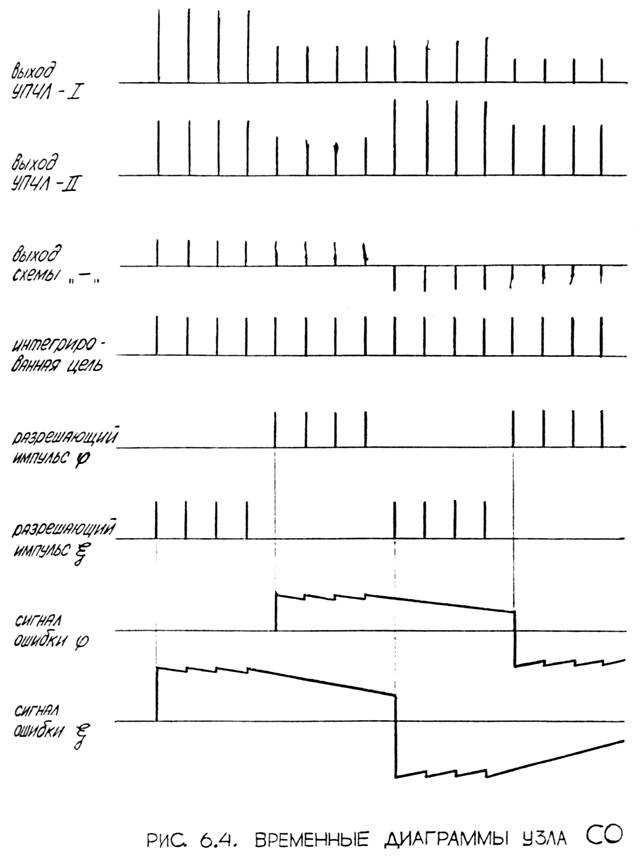
С ключевых детекторов сигнал ошибки с частотой 62,5 Гц и амплитудой, пропорциональной углу рассогласования между направлением на цель и направлением равносигнальной зоны, поступают через ЗП (ЗПЗ и ЗПЧ) и видеоусилители (ВУ-3 и ВУ-4) на узлы УС-φ и УС-ξ системы управления антенной (рис. 6.4).
Импульсы цели и шумы УПЧЛ 1-го и 2-го каналов подаются также на схему сложения СХ+ в узла (СИ) синхронизатора, в котором осуществляется временная селекция и интегрирование. Временная селекция импульсов по частоте повторения используется для борьбы с несинхронными импульсными помехами. Защита РЛС от несинхронных импульсных помех может быть осуществлена путем подачи на схему совпадения не задержанных отраженных сигналов и тех же сигналов, но задержанных на время, точно равное периоду повторения излучаемых импульсов. При этом через схему совпадения пройдут лишь те сигналы период следования которых точно равен периоду следования излучаемых импульсов.
С выхода схемы сложения импульс цели и шумы через фазоинвертор (Φ1) и эмиттерный повторитель (ЗП1) поступают на каскад совпадения. Схема суммирования и каскад совпадения являются элементами замкнутой системы интегрирования с положительной обратной связью. Схема интегрирования и селектор работают следующим образом. На вход схемы (Σ) поступают импульсы суммированной цели с шумами и импульсы интегрированной цели. Их сумма поступает на модулятор и генератор (МиГ) и на УЛЗ. В данном селекторе используется ультразвуковая линия задержки. Она состоит из звукопровода с электромеханическими преобразователями энергии (пластины кварца). УЛЗ могут использоваться для задержки как ВЧ импульсов (до 15 МГц), так и видеоимпульсов. Но при задержке видеоимпульсов происходит значительное искажение формы сигнала. Поэтому в схеме селектора сигналы, подлежащие задержке, вначале преобразуются с помощью специального генератора и модулятора в ВЧ импульсы с частотой заполнения 10 МГц. С выхода УЛЗ задержанный на период повторения РЛС импульс цели поступает на УПЧ-10, с вывода УПЧ-10 задержанный и продетектированный на детекторе(Д) сигнал через ключ (КЛ) (УПЧ-10) подается на каскад совпадения (КС), на этот же каскад подается суммированный импульс цели.
На выходе каскада совпадения получается сигнал, пропорциональный произведению выгодных напряжений, поэтому импульсы цели, синхронно поступающие на оба входа КС, легко проходят каскад совпадения, а шумы и несинхронные помехи сильно подавляются. С выхода (КС) импульсы цели через фазоинвертор (Φ-2) и (ЗП-2) снова поступают на схему (Σ), замыкая тем самым кольцо обратной связи, кроме тoгo, интегрированные импульсы цели поступают в узел СО, на схемы формирования разрешающих импульсов ключевых, детекторов (ОФРИ 1) и (ОФРИ 2).
Интегрированные импульсы с выхода ключа (КЛ) помимо каскада совпадения поступают на схему защиты от несинхронной импульсной помехи (СЗ), на второе плечо которой поступают импульсы суммированной цели и шумы с (3П 1). Схема защиты от несинхронной помехи представляет собой схему совпадения на диодах, которая пропускает наименьшее из двух синхронно действующих на ее входах напряжении. Так как интегрированные импульсы цели всегда значительно больше суммированных, а напряжение шумов и помех сильно подавляется в схеме интегрирования, то в схеме совпадения (СЗ), по существу, происходит селекция суммированных импульсов цели импульсами интегрированной цели. Получаемый в результате импульс "прямой цели" обладает той же амплитудой и формой, что и суммированный импульс цели, в то время как шумы и несинхронные помехи подавляются. Импульс прямой цели поступает на временной дискриминатор схемы дальномера и узел автомата захвата, системы управления антенной. Очевидно, что при использовании данной схемы селекции необходимо обеспечить весьма точное равенство времени задержки в УЛЗ и периода следования излучаемых импульсов. Это требование можно выполнить путем использования специальных схем формирования импульсов синхронизации, в которых стабилизация периода повторения импульсов осуществляется УЛЗ схемы селекции. Генератор импульсов синхронизации расположен в узле МПС - 2 и является блокинг-генератором (ЗВГ) с собственным периодом автоколебаний, немного больше времени задержки в УЛЗ, т.е. больше 1000 мкс. При включении РЛС, первый импульс ЗВГ дифференцируетсяи запускает БГ-1, с выхода которого снимается несколько импульсов синхронизации:
· Отрицательный импульс синхронизации Т=11 мкс подается вместе с импульсом селекции дальномера на схему (СУ), которая формирует импульсы управления узла СИ на время действия которых открывается каскад манипуляции (КМ) в узле (СИ) и происходит работа каскада сложения (СХ +) и всех последующих. В результате импульс синхронизации БГ1 проходит через (СХ +), (Φ 1), (ЭП-1), (Σ), (МиГ), (УЛЗ), (УПЧ-10), (Д) и задержанный на период повторения РЛС (Тп=1000мкс), запускает ЗБГ передним фронтом.
· Отрицательный импульс запирания УПЧ-10 Т = 12 мкс запирает ключ (КЛ) в узле СИ и тем самым препятствует попаданию импульса синхронизации БГ-1 в схему (КС) и (СЗ).
· Отрицательный дифференцированный импульс синхронизации запускает схему формирования импульса запуска дальномера (СΦЗД) импульс запуска дальномера синхронизирует временной модулятор (ВМ), а также через линию задержки (ЛЗ) поступают на схему формирования импульса запуска передатчика СΦЗП. В схеме (ВМ) дальномера по фронту импульса запуска дальномера формируются отрицательные импульсы ограничения времени приема f = 1 кГц и Т =250 мкс. Они подаются назад в узел МПС-2 на ЗБГ для исключения возможности срабатывания ЗБГ от импульса цели, кроме того задним фронтом импульса ограничения времени приема запускается схема формирования строб-импульса АРУ (СФСИ), а строб-импульсом АРУ - схема формирования импульсов манипуляции (СΦМ). Эти импульсы подаются в радиочастотный блок.
Сигналы ошибки с выхода узла (СО) синхронизатора поступают в узлы углового сопровождения (УС φ, УС ξ) системы управления антенной на усилители сигнала ошибки (УСО и УСО ). С выхода усилителей сигнала ошибки сигналы ошибки поступают на парафазные усилители (ПФУ), с выходов которых сигналы ошибки в противоположных фазах подаются на входы фазового детектора - (ФД 1). На фазовые детекторы подаются также опорные напряжения с выходов ФД 2 мультивибраторов опорных напряжений (МВОН), на входы которых подаются опорные напряжения с узла УФ-2 (канал φ ) или узла КП-2 (каналу ξ ) синхронизатора. С выходов фазовых детекторов напряжения сигналов, ошибки подаются на контакты реле подготовки захвата (РПЗ). Дальнейшая работа узла зависит от режима работы системы управления антенной.
5. ДАЛЬНОМЕР
В дальномере РЛГС 5Г11 применена электрическая схема измерения дальности с двумя интеграторами. Данная схема позволяет получить большую скорость захвата и сопровождения цели, а также выдавать дальность до цели и скорость сближения в виде постоянного напряжения. Система с двумя интеграторами осуществляет запоминание последней скорости сближения при кратковременном пропадании цели.
Работа дальномера может быть описана следующим образом. Во временном дискриминаторе (ВД) временная задержка импульса, отраженного от цели, сравнивается с временной задержкой импульсов сопровождения ("Ворот"), создаваемой электрическим временным модулятором (ВM),в который входит схема линейной задержки. Схема автоматически обеспечивает равенство между задержкой ворот и задержкой импульса цели. Так как задержка импульса цели пропорциональна расстоянию до цели, а задержка ворот пропорциональна напряжению на выводе второго интегратора, то в случае линейной зависимости между задержкой ворот и этим напряжением, последнее будет пропорционально расстоянию до цели.
Временной модулятор (ВМ), кроме импульсов "ворот", Формирует импульс ограничения времени приема и импульс селекции дальности, причем, в зависимости от того находится ли РЛГС в режиме поиска или захвата цели меняется его длительность. В режиме "поиск" Т = 100мкс, а в режиме "захват" Т = 1,5мкс.
6. СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ
В соответствии с задачами, выполняемыми СУА, последняя может быть условно разбита на три отдельные системы, каждая из которых выполняет вполне определенную функциональную задачу.
1.Система управления головкой антенны. В нее входит:
· узел УГА
· схема запоминания по каналу "ξ" в узле ЗП
· привод - электродвигатель типа СД-10а, управляемый посредством электромашинного усилителя типа УДМ-3А.
2.Система поиска и гиростабилизации. В нее входят:
· узел ПГС
· выходные каскады узлов УС
· схема запоминания по каналу "φ" в узле ЗП
· привод на электромагнитных поршневых муфтах с датчиком угловых скоростей (ДУСос) в цепи обратной связи и узла ЗП.
3.Система углового сопровождения цели. В нее входят:
· узлы: УС φ, УС ξ, A3
· схема выделения сигнала ошибки в узле СО синхронизатора
· привод на электромагнитных порошковых муфтах с ДУСом в обратной связи и узла ЗП.
Рассмотрение работы СУА целесообразно провести последовательно, в порядке выполнения ракетой следующих эволюций:
1. "взлет",
2. "наведение" по командам с земли
3. "поиск цели"
4. "предварительный захват"
5. "окончательный захват"
6. "автоматическое сопровождение захваченной цели"
С помощью специальной кинематической схемы блока обеспечивается необходимый закон движения зеркала антенны, а следовательно и перемещение характеристик направленности по азимуту (ось φ) и наклону (ocь ξ) (puc.8.4).
Траектория движения зеркала антенны зависит от режима работы системы. В режиме "сопровождение" зеркало может совершать только простые движения по оси φ - на угол 30°, и по оси ξ - на угол 20°. При работе в режиме "поиск", зеркало совершает синусоидальное колебание относительно оси φн (от привода оси φ) с частотой 0.5 Гц и амплитудой ± 4°, и синусоидальное колебание относительно оси ξ (от профиля кулачка) с частотой f = 3 Гц и амплитудой ± 4°.

Таким образом обеспечивается просмотр зоны 16"х16" т.к. угол отклонения характеристики направленности в 2 раза больше угла поворота зеркала антенны.
Кроме того, просматриваемая зона перемещается по осям (приводами соответствующих осей) командами с земли.
7. РЕЖИМ "ВЗЛЕТ"
При взлете ракеты зеркало антенны РЛГС должно находиться в нулевом положении "слева-вверху", что обеспечивается системой ПГС (по оси φ и по оси ξ).
8. РЕЖИМ "НАВЕДЕНИЕ"
В режиме наведения положение луча антенны (ξ =0 и φ =0) в пространстве задается с помощью управляющих напряжений, которые снимаются с потенциометров и узла гиростабилизации зоны поиска (ГС) и заводится соответственно в каналы узла ПГС.
После вывода ракеты в горизонтальный полет, в РЛГС через бортовую станцию подачи команд (СПК) подается разовая команда "наведение". По этой команде узел ПГС удерживает луч антенны в горизонтальном положении, разворачивая его по азимуту в направлении, задаваемом командами с земли "доворот зоны по "φ".
Система УГА в этом режиме удерживает голову антенны в нулевом положении относительно оси "ξ".
9. РЕЖИМ "ПОИСК".
При сближении ракеты с целью до расстояния примерно равного 20-40 км, через СПК на станцию подается разовая команда "поиск". Эта команда поступает в узел (УГА), при этом происходит переключение узла в режим скоростной следящей системы. В этом режиме на вход усилителя переменного тока (УС) узла (УГА) поступает сумма фиксированного сигнала частоты 400 Гц (36В) и напряжение скоростной обратной связи с токогенератора ТГ-5А. При этом вал исполнительного двигателя СД-10А начинает вращаться с фиксированными оборотами, и через кулачковый механизм заставляет качаться зеркало антенны относительно штока (т.е. относительно оси "ξ") с частотой 3 Гц и амплитудой ± 4°. Одновременно двигатель вращает синусный потенциометр - датчик (СПД), выдающий напряжение "заводка" с частотой 0,5 Гц на азимутальный канал системы ПГС. Это напряжение подается на суммирующий усилитель (УС) узла (КС φ) и далее на привод антенны по оси. В результате этого зеркало антенны начинает совершать колебания по азимуту с частотой 0,5 Гц и амплитудой ± 4°.
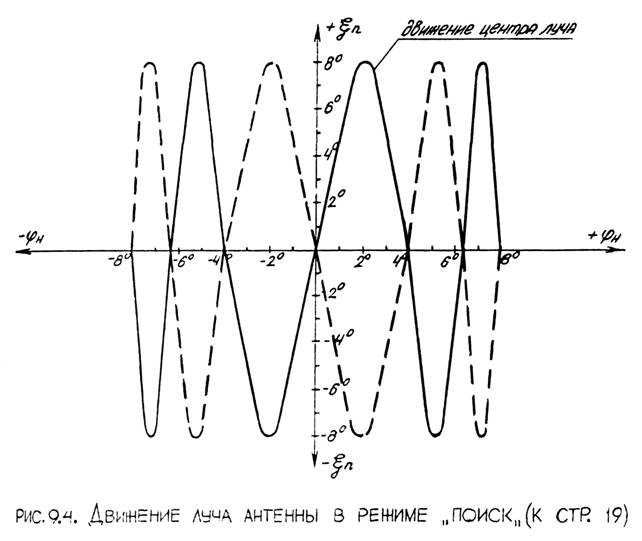
Синхронное качание зеркала антенны системами УГА и ПГС, соответственно по углу места и азимуту, создает поисковое движение луча, показанное на рис. 3.4.
В режиме "поиск" выходы фазовых детекторов узлов (УС - φ и УС - ξ) контактами обесточенного реле (РПЗ) отключены от входа суммирующих усилителей (СУ).
В режиме "поиск" на вход узла (ЗП) по каналу "φ" поступает напряжение отработки "φн" и напряжение с гироазимута "φг", по каналу "ξ" - напряжение обработки "ξп".
10. РЕЖИМ "ПОДГОТОВКА ЗАХВАТА".
Для уменьшения времени обзора поиск цели в РЛГС осуществляется с большой скоростью. В связи с этим в станции применяется двухступенчатая система захвата цели, с запоминанием положения цели при первом обнаружении, с последующим возвратом антенны в запомненное положение и вторичным окончательным захватом цели, после которого уже следует ее автосопровождение. Как предварительный, так и окончательный захват цели осуществляете схемой узла A3.
При появлении цели в зоне поиска станции видеоимпульсы "прямой цели" со схемы защиты от несинхронных помех узла (СИ) синхронизатора начинают поступать через усилитель сигнала ошибки (УСО) узла (АЗ) на детекторы (Д-1 и Д-2) узла (A3). При достижении ракетой дальности, на которой отношение сигнал/шум оказывается достаточным для срабатывания каскада реле подготовки захвата (КРПЗ), последний вызывает срабатывание реле подготовки захвата (РПЗ) в узлах (УС φ и УС ξ). Автомат захвата (A3) при этом сработать не может, т.к. он отпирается напряжением со схемы (АПЗ), которое подается только через 0,3 сек после срабатывания (АПЗ) (0,3 сек - время, необходимое для возврата антенны в точку, где была первоначально обнаружена цель).
Одновременно со срабатывании реле (РПЗ):
· от узла запоминания(ЗП) отключаются входные сигналы "ξп" и "φн"
· со входов узлов (ПГС) и (УГА) снимаются напряжения, управляющие поиском
· узел запоминания (ЗП) начинает выдавать запомненные сигналы на входы узлов (ПГС) и (УГА).
Для компенсации ошибки схем запоминания и гиростабилизации на входы узлов (ПГС) и (УГА) одновременно с запомненными напряжениями с узла (ЗП) подается напряжение качания (f = 1,5 Гц), вследствие чего, при возвращении антенны в запомненную точку происходит качание луча с частотой 1,5 Гц и амплитудой ± 3° .
В результате срабатывания реле (РПЗ) в каналах узлов (УС ) и (УС ) на вход приводов антенны по каналам "φ" и "ξ" одновременно с сигналами с ПГС подключаются выходы узлов (УС), в результате чего приводы начинают управляться также и сигналом ошибки системы углового сопровождения. Благодаря этому при повторном попадании цели в диаграмму направленности антенны система сопровождения втягивает антенну в равносигнальную зону, облегчая возврат в запомненной точку, повышая, таким образом, надежность захвата.
11. РЕЖИМ "ЗАХВАТА"
По истечении 0,4 сек после срабатывания реле подготовки захвата, снимается блокировка. В результате этого, при повторном попадании цели в диаграмму направленности антенны происходит срабатывание каскада реле захвата (КРЗ), который вызывает:
· срабатывание реле захвата (РЗ) в узлах (УС "φ" и УС "ξ") отключающих сигналы, поступающие с узла (ПГС). Система управления антенной переходит в режим автоматического сопровождения цели
· срабатывание реле (РЗ) в узле УГА. В последнем происходит отключение сигнала, поступающего с узла (ЗП) и подключение потенциала "земли". Под воздействием появившегося сигнала система УГА возвращает зеркало антенны в нулевое положение по оси "ξп". Возникающий при этом, вследствие увода равносигнальной зоны антенны с цели, сигнал ошибки отрабатывается системой СУД, по основным приводам "φ" и "ξ". Во избежание срыва сопровождения, возврат антенны к нулю по оси "ξп" производится с пониженной скоростью. При достижении зеркалом антенны нулевого положения по оси "ξп". срабатывает система фиксации зеркала.
12. РЕЖИМ "АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ЦЕЛИ"
С выхода узла СО со схем видеоусилителей (ВУЗ и ВУ4) разделенный по осям "φ" и "ξ" сигнал ошибки частотой 62,5 Гц поступает через узлы УС "φ" и УС "ξ" на фазовые детекторы. На фазовые детекторы также заводится опорное напряжение "φ" и "ξ" , поступающее со схемы триггера опорных напряжений (ТОН "φ") узла КП-2 и схемы формирования импульсов коммутации (СΦИКМ "П") узла УФ-2. С фазовых детекторов сигналы ошибки поступают на усилители (СУ "φ" и СУ "ξ") и далее на приводы антенны. Под воздействием поступившего сигнала привод поворачивает зеркало антенны в сторону уменьшения сигнала ошибки, осуществляя тем самым слежение за целью.
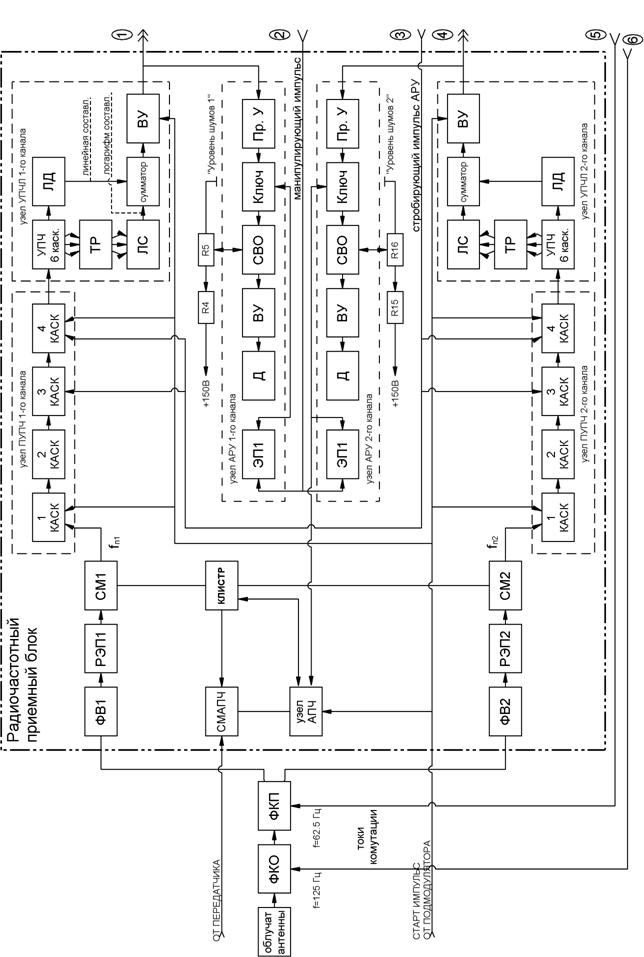


[1] Рисунок расположен в конце всего текста. Схема разбита на три части. Переходы выводов из одной части в другую, обозначены цифрами.